![]()
Я отыграл большое количество часов и могу поделится с вами своим опытом. Вся информация взята из свободных ресурсов таких как форумы, сайт игры, мой личный опыт и англоговорящие ютуберы которые посвятили все свое время только этой игре. Я попытался собрать все воедино что бы вам было удобнее, на русском пространстве вы такое точно не найдете, так как я постарался быть краток и максимально информативен.
В гайде описаны самые необходимый на мой взгляд методы, которые помогут вам влиться в игру с первых же минут, я постарался уложится как можно короче что бы вы не устали это читать.
В нем вы поймете кнопки которые вам нужно нажать на своем самолете, чтобы активировать автопилот (это не то же самое, что ваш второй пилот на верхней панели). Это не подробный гайд на 100 листов, как я уже сказал выше только самое необходимо.
— Основы
Многие самолеты не имеют автопилота, но некоторые из них есть, и это действительно здорово, если вы хотите отойти и заняться другими делами.
Это немного сложнее, чем настроить круиз-контроль на машине, но все же это простое нажатие кнопок. Для некоторых из этих вещей есть привязки клавиш, но я обнаружил, что они иногда ничего не делают, и более надежно просто нажимать кнопки с помощью мыши. Кроме того, наведение курсора на кнопки помогает понять, что они иногда делают, если они обозначены немного иначе, чем вы привыкли. Я рекомендую сделать это в незнакомом самолете перед взлетом, особенно чтобы убедиться, что вы знаете, где находятся все кнопки автопилота, чтобы вам не было сложно управлять самолетом, а также пытаться их найти.

Итак, вот кнопки, которые вам нужно знать. Как правило, все они расположены на одной панели, поэтому, как только вы найдете одну, вы найдете их все. Я думаю, что легче всего понять самолеты с навигационными системами G1000, такими как Cessna 172 и Beechcraft Bonanaza G36.
— Основы
Многие самолеты не имеют автопилота, но некоторые из них есть, и это действительно здорово, если вы хотите отойти и заняться другими делами.
Это немного сложнее, чем настроить круиз-контроль на машине, но все же это простое нажатие кнопок. Для некоторых из этих вещей есть привязки клавиш, но я обнаружил, что они иногда ничего не делают, и более надежно просто нажимать кнопки с помощью мыши. Кроме того, наведение курсора на кнопки помогает понять, что они иногда делают, если они обозначены немного иначе, чем вы привыкли. Я рекомендую сделать это в незнакомом самолете перед взлетом, особенно чтобы убедиться, что вы знаете, где находятся все кнопки автопилота, чтобы вам не было сложно управлять самолетом, а также пытаться их найти.
Итак, вот кнопки, которые вам нужно знать. Как правило, все они расположены на одной панели, поэтому, как только вы найдете одну, вы найдете их все. Я думаю, что легче всего понять самолеты с навигационными системами G1000, такими как Cessna 172 и Beechcraft Bonanaza G36.
AP = Автопилот
Я также видел его по какой-то причине с маркировкой AAP и CMD, но обычно это AP. Сам по себе он не так нужен, но необходим, чтобы все остальные кнопки работали. Однако он может помешать вам наклониться, даже не нажимая никаких других кнопок.
ALT = удержание высоты
Это следующая кнопка, которую вы захотите нажать. Когда вы окажетесь на желаемой высоте, нажмите ее, и вы останетесь там. Довольно просто. Выбранная вами высота отображается в верхней части полосы высоты. Есть способы заставить автопилот перейти на следующую высоту для вас, но я предпочитаю добираться туда вручную, чтобы стартовать. Иногда кажется слегка ненадежным позволить автопилоту делать это. Иногда эта кнопка на самом деле является ручкой, которую вы нажимаете, но мы рассмотрим функцию ручки позже.
NAV = Навигация
Это третья кнопка, которую вы нажимаете. Это та, которая на самом деле следует вашим линиям GPS и управляет самолетом за вас. На самолетах G1000 убедитесь, что вы нажали кнопку CDI в нижней части левой панели, чтобы на индикаторе направления появились пурпурные линии вместо зеленых, иначе он не будет работать (кнопка CDI видна внизу панель на втором рисунке этого руководства). На 747, я думаю, вам нужно нажать VNAV и LNAV или что-то в этом роде, чтобы он работал. Я предполагаю, что это означает вертикальную и боковую навигацию. Иногда на других планах вещи обозначаются немного иначе. Опять же, наведите указатель мыши на кнопки, чтобы увидеть их функции в незнакомой кабине.
— Дополнительные параметры автопилота
Это абсолютная основа, но есть и другие кнопки, которые могут быть полезны:
HDG = режим курса
Не путать с ручкой HDG.
Нажатие кнопки заставляет самолет следовать по прямой линии по выбранному вами курсу, который отображается в виде маркера на индикаторе вашего курса. Вы выбираете этот заголовок с помощью ручки HDG, и обычно вы можете нажать на ручку, чтобы синхронизировать его с вашим текущим курсом.
FLC = Контроль эшелона полета
Если вы хотите, чтобы автопилот доставил вас на другую высоту (очень полезно для полетов на больших высотах на авиалайнерах, сначала поверните ручку ALT, пока не установите желаемое значение. Самолет не будет пытаться изменить высоту, пока вы не нажмете эту кнопку. Он работает, пытаясь перейти на другую высоту, изменяя угол подъема / спуска, при этом пытаясь сохранить воздушную скорость относительно одной и той же точки. На G1000 есть кнопки, обозначенные носом вверх и носом вниз, чтобы увеличивать и уменьшать эту скорость. Я не уверен, что они могут присутствовать в других системах или быть помечены как-то еще.

VS = вертикальная скорость
Это устанавливает вашу вертикальную скорость, и самолет будет пытаться изменить другие аспекты, чтобы сохранить их неизменными, пока вы не достигнете заданной высоты. Я бы не рекомендовал использовать это, потому что он в основном делает то же самое, что и FLC, но FLC лучше. Но я решил, что все равно расскажу об этом.
Всем спасибо, теперь вы знаете все основы и конечно же, Удачи в ваших полётах!
— Авторство
Автор гайда — Tiloppes
Материалы предназначены для сайта PlayGround.ru. Гайд был написан для выполнения задания.
Инструкция по установке
Установку авточехлов на Ваш автомобиль могут произвести наши мастера. Они могут выехать к Вам по адресу, либо Вы можете приехать и установить авточехлы в наших установочных центрах. Установочные центры находятся по адресам:
1) Улица Чагинская, дом 4, строение 2 (от 1700 рублей);
2) Автомобильный торговый центр АТЦ «МОСКВА» (метро Домодедовская), город Москва, Каширское шоссе, дом 61, строение 3 «А» (от 1700 рублей);
3) Установка с выездом.
Установка с выездом от 2200 рублей в пределах МКАД.
Подробный прайс лист:
- Установка авточехлов на 2-3 места: 1700 рублей
- Установка авточехлов на 5 мест: 2000 рублей
- Установка авточехлов на 7 мест: 3000 рублей
- Установка авточехлов на 8-9 мест: 3500 рублей
Услуга подшива чехлов к сиденьям автомобиля:
- Подшив двух передних сидений (нижняя часть): 1000 рублей
- Подшив заднего сиденья (нижняя часть целиковая): 1000 рублей
- Подшив заднего сиденья (три отдельных части): 500 рублей за одно место
Выезд мастера для установки авточехлов по Москве и МО:
- Выезд в пределах МКАД: +500 рублей к стоимости установки
- Выезд за пределы МКАД: +500 рублей к стоимости установки и дополнительно по 40 рублей за километр
* Стоимость установки с выездом за пределы МКАД обговаривается непосредственно с менеджером по телефону.
* Мы производим установку авточехлов только нашего производства.
Записаться на установку авточехлов можете по телефону: +7 (495) 989-70-31
Для самостоятельной установки предлагаем вам ознакомится с данной инструкцией.
При разработке лекал модельер-констуктор прежде всего учитывает визуальное восприятие авточехлов потребителем (покупателем), так, чтобы это было естественным приобретением, как, например, купить понравившийся Вам костюм, а самое главное — быть уверенным, что «костюмчик сядет хорошо». Представление о чехлах, которое было на протяжении прошлых лет, заключалось в том, что надо просто сохранить сидение автомобиля от загрязнений и не более. В настоящее время видение о чехлах совсем другое – это направление моды, которое стимулирует сделать этот товар стильным и качественным, и даже стать лучше родной обивки сидений автомобиля!
Видеоинструкция по самостоятельной установке:
Авточехлы, произведенные ООО Росшвейнгрупп «АВТОПИЛОТ», соответствуют всем современным технологиям, практичны, имеют свой неповторимый стиль и, конечно, удобны для установки.
Если воспользоваться услугой профессионального установщика чехлов, тогда, автоматически этот вопрос решен. Наблюдая за тем, как профессионал одевает чехлы, Вам становится ясно, что Вы сделали правильный выбор в пользу этой услуги. Это мнение сложилось при непосредственном опросе большинства покупателей. Такая услуга занимает около двух часов времени, но требует дополнительных расходов со стороны покупателя за работу установщика.
Данная услуга, как правило, востребована людьми, у которых просто нет свободного времени, или они всегда доверяют работу только профессионалам, чтобы быть уверенным в качественном результате.
В тоже время надо учитывать и тот фактор, что другой сегмент покупателей по некоторым причинам и условиям не имеет возможности воспользоваться такой услугой. Возможно они сами являются «мастерами на все руки», поэтому для них установка авточехлов не вызовет особых трудностей.
Это вступительная часть должна помочь выбрать подходящий для Вас вариант. Если принято решение самостоятельно установить весь комплект, то наша компания попробует описать для Вас подробную инструкцию установки чехлов от Росшвейнгрупп «АВТОПИЛОТ». В комплекте авточехлов вложена общая инструкция (см. оборот рекламки), в которой указаны основные моменты. Но с учетом того, что в некоторых моделях автомобилей есть свои особенности, мы предлагаем Вам более детальное описание данного процесса.
Первым делом, при выборе чехлов, надо правильно знать не только полное название Вашего автомобиля, но и комплектацию автомобиля, салона, год выпуска. Именно по этой информации и сравнениям продавец должен подобрать для Вас «родные» чехлы, которые подойдут точно по сидениям вашего авто. Вы даже не представляете, сколько бывает разновидностей салонов! Различия могут быть в передних и задних подголовниках, передних и задних спинках, сидениях и подлокотниках. В чемодане, на лицевой рекламке, которая прилагается к чехлу, указана вся необходимая информация – точное название марки автомобиля, как на английском, так и на русском языках, года выпуска данного транспортного средства, тип кузова, схематический рисунок комплектации, комплектность чехлов поименно – сколько спинок, подголовников и т.д., а также другие важные особенности. На основании этого, при покупке продукции покупатель может сам проконтролировать правильный подбор чехлов именно на свой автомобиль.
Когда Вы приобрели чехлы и готовы их установить на свой автомобиль, мы рекомендуем даже при 100% уверенности в правильной подборке комплекта, визуально проверить все изделия по качеству, совпадению с деталями салона, креплениями, и самое главное, оценить свои силы для установки.
Далее по тексту идет подробное описание каждого этапа установки авточехлов. Некоторым покупателям часть информации может не понадобится, но мы хотим рассказать обо всех особенностях более детально.
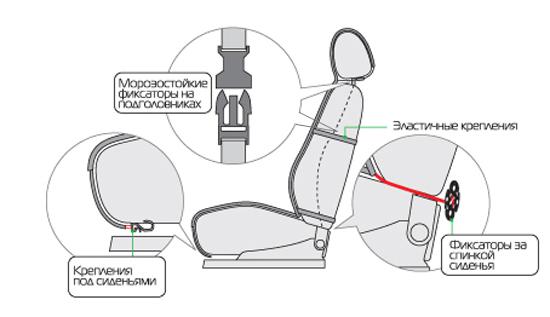
Первым делом необходимо снять все подголовники. С учетом того, что подголовники бывают разные, механизмы их освобождения так же отличаются друг от друга.
Любой простой подголовник, снимается путем нажатия на один или сразу два рычажка, но бывают модели, у которых есть скрытный маленький рычажок или клавиша. Передние подголовники на последних моделях автомобилей с полной комплектацией могут быть активными, и они (штыри) не вытаскиваются по технологическим причинам – например, электропривод. В таких случаях сам чехол уже предусмотрен к установке по принципу «футболки» – верх чехла открыт под щель, и крепится липучками.
И так, подголовники сняты, затем визуально оцениваем дальнейшие действия: что еще необходимо открепить или возможно одеть на месте. Почти на всех моделях передние кресла можно одеть, не снимая их. Но здесь нужно обратить внимание на болты: обыкновенные или звездочки, которых у Вас может не быть? Можно отвернуть 4 болта, и кресло — у Вас на столе, что позволит намного легче произвести установку и полноценную утяжку.
С другой стороны, Вы знаете, что в передней спинке стоит подушка безопасности, и она напрямую связана с компьютером, а при неправильном отсоединении может возникнуть ошибка. Поэтому лучше одеть чехлы на переднее кресло на месте, не отсоединяя его.
Для тех, кто все же решил снять переднее кресло по любым причинам (мороз и т.д.), демонтировать нужно в следующей последовательности: отсоединяем клемму аккумулятора и рассоединяем фишку (тонкой отверткой), и наоборот, соединили фишку, а потом накинули клемму. При этом лампочка подушки на щитке приборов может не погаснуть, в этом случае необходимо еще раз снять клемму, в результате она должна погаснуть.
При одевании переднего кресла на любую модель, сначала одеваем сидение, так будет удобнее при утяжки шнуром и креплении крючков на резинке. Откинув спинку, кладем чехол сидения на само сидение, заправляем заднюю пришивку с крючками между спинкой и сидением. В большинстве случаев это легко, но на некоторых моделях бывает очень узкая щель, поэтому приходится постараться. Затем заправляем «юбку» чехла под декоративную пластмассу, которая находится со стороны двери, для этого оттягиваем пластмассу, и если на юбке есть резинки с крючками, то необходимо воспользоваться обязательно линейкой 30 см, лучше деревянной. Именно ей будет удобно пропустить крючок с резинкой между пластмассой вниз под сидение. Отсоединять эту пластмассу от сидения не следует, так как крепление, как правило, на клипсах и разовое.
Уже заправленный чехол поправляем по сидению, и укладываем шнурок в проемы между спинкой и сидением, либо по бокам сидения, это зависит от конструкции. Затем важный момент — цепляем крючки за самые дальние места под сидением. Шнур на одном конце завязан в петлю специально, чтобы другим концом шнура через петлю было удобнее производить утяжку. Шнур на некоторых моделях проходит через железную арматуру (уголок) и при утяжке может перерезаться (перетереться). Во избежание этого (для данных моделей) на шнур одевается белый кембрик (трубочка), что позволяет произвести сильную утяжку без проблем.
Утягивая шнуром чехол сидения, необходимо нажимать на сидение по всему периметру – так достигается сильная утяжка шнуром под низ сидения. Утянув шнур, завязываем его на узел практически одной рукой, другой рукой в этот момент придерживаем натяжку – в результате делаем два узла. Оставшийся конец шнура (около метра), протягиваем под сидением вперед и продеваем в петлю, которая висит на юбке спереди (под коленками). Далее возвращаем шнур снова назад, к тому же узлу, и, натянув, умеренно завязываем его. Вот собственно правильная установка переднего чехла на сидение. Такие требования должны быть обязательно соблюдены для переднего сидения, так как именно оно является самым уязвимым местом для чехлов в плане «крепкой посадки». Правильно утянутый чехол никогда не сползет и не сморщится, и будет смотреться как «родная» обивка.
Далее приступаем к установке чехлов на спинки передних сидений. Необходимо внимательно осмотреть сам чехол и понять последовательность действий. На самих передних спинках обязательно есть клипсы под подголовник, подлокотник у водителя справа, на торце -рычажок выдвижения валика для спины, а так же подушка безопасности (AIRBAG) на спинке у двери. На чехле уже есть все обозначения и отверстия, обработаные швейным оборудованием. Это позволит методом «шиномантажа» заправить их под низ. Допустим, что дырки под подголовник на чехле сделаны меньшего размера, чем сами клипсы, и чтобы заправить их под низ, потребуется немного усилий или даже отвертку, с помощью которой можно (с треском) заправить дырки. Если дырки намного меньше, чем клипсы, а клипсы бывают разной величины, тогда можно их просто подрезать в уголках, чтобы было легче заправить. Все заправленные технологические отверстия создадут так же вид «родной» обивки.
Накинув чехол спинки на верх самой спинки, можно сразу произвести заправку клипс под подголовник – это даст центровку чехла на спинке. Затем, поджимая бока спинки, одеваем чехол до самого низа. Обычно чехол садится очень туго, особенно в боках, для этого можно порвать торец. Осадив чехол, крепко берем за переднюю пришивку с липучкой и за задний тыл, где так же находится липучка, и сильно подсаживаем чехол по всему низу. Заправляем переднюю пришивку с липучкой под спинку и вытягиваем с большим усилием сзади, чтобы закрепить ее с тыльной липучкой. Как уже говорилось, чехол садится очень туго и, как правило, липучки не сходятся на 3-4 см. Вот эти сантиметры придется натянуть и закрепить с большим усилием. Такую операцию можно произвести с помощником – он «по лицу», толкает середину чехла под спину в щель, и тем самым, Вы натягиваете пришивку и соединяете липучки. Порой липучка ложится не ровно, морщится, тогда необходимо пробовать заново. Все швы должны быть расправлены по периметру.
Завершающий этап – это закрепить крючками висячую шторку под сидением. Это обыкновенное, стандартное крепление спинки, но бывает, что сквозной щели между спинкой и сидением нет, либо она закрыта родной жесткой шторкой. В этом случае шторку отстегиваем под сидением и заправляем ее вверх — под чехол.
При разработке лекал, наша компания продумывает весь процесс – каким образом будет удобнее установить чехол, а самое главное, как он будет туго сидеть. Например, у Рено Логан, Сандеро, Дастер, Ларгус и Мегана совсем ничего не отстегивается, и нет сквозной щели между спинкой и сидением. В таких случаях придумывается свое крепление – более сложное при установке.
Теперь спинка и сидение одеты, Вы видите отличный результат, и даже с учетом того, что прошло больше часа времени, у Вас прекрасное настроение!
Далее приступаем к заднему ряду сидений автомобиля, при этом также оцениваем ситуацию: можно ли одеть чехлы, не снимая спинку или сидение. Седаны, хэтчбэки, универсалы, минивэны — все салоны устроены по-разному с учетом устройства кузова и удобства эксплуатации. На седанах задние сидения бывают сплошные и деленные 40/60; хетчбэки и универсалы — чаще всего деленные 40/60 или 50/50. На последних выпусках хэтчбеков и джипов задний ряд сидений бывает в виде трансформера (когда задняя спинка и сидение не только двигаются, но и складываются книжкой в два раза, возможно даже автоматически без помощи водителя). В связи с тем, что салон у данных автомобилей не простой, стоит понимать, что и установка чехлов будет более сложной, чем обычно. Тем не менее, чехлы от ООО Росшвейнгрупп «Автопилот» на любые сидения произведены с учетом всех особенностей, и прочитав все выше изложенное в этой инструкции, Вы можете не сомневаться, что уверенно справитесь с установкой!
Продолжаем процесс установки. Вы посмотрели, оценили ситуацию и определились, что, например, сидение необходимо обязательно снимать. Теперь нужно понять, принцип и последовательность дальнейших действий. Если возникает какая-то непонятная особенность, то она обязательно указана на лицевой рекламке с чехлами.
Сидение на многих автомобилях снимается отдельно и легко, буквально потянув его вверх в районе коленок – у двери. Но бывает, что, не смотря на все попытки, так просто это сделать не удается, хотя само крепление находится на видном месте. Да, такое бывает, и приходится вырывать сидение вместе с клипсой, а потом так же забивать посадочный замок в гнездо.
Когда само сидение снято, начинаем устанавливать спинку сидения. Если Вы понимаете, что спинку снимать не обязательно, то соответственно одеваете ее на месте. Обращаем Ваше внимание, что на некоторых моделях по бокам спинки стоят отдельные части спинки-боковушки. Они получили название «надкрыльники», так как стоят над крыльями. Снимаются они так же легко и в большинстве случаев одинаково. Сняв сидение, Вы откручиваете крепление «надкрыльников» на полу кузова и толкаете их вверх. Чехольчики «надкрыльников» одеваются туго и сильно завязываются резинками.
Сидение одевается на столе, предварительно подготовив обтяжной шнур. Утяжка должна быть очень тугой и правильной, а именно подтягивая, ужимаете по всему периметру. В любом случае шнура хватает для полной перетяжки крест на крест.
Заднюю спинку одеваем по принципу передней спинки, и так же продеваем все дырки под низ. При разработке лекал учитывается, где можно заправить чехол (дырки) под низ, а где, это невозможно по конструкции спинки и обивки. Как уже говорилось ранее, все заправляется очень туго, буквально с отверткой, треском, если нужно — с надрезами.
На спинках некоторых моделей центральный ремень безопасности выходит из самой спинки и крепится на полу кузова или даже в сидении трансформера. В таких случаях, если крепление на полу крепится простым болтом, а не звездочкой, то чехол спинки делается с дыркой под ремень, в которую он и продевается, чтобы оказаться поверх чехла.
Там, где ремень прикреплен к полу звездочкой, чехол технологически сконструирован по другому принципу (в виде «распашонки»), то есть на тыльной части спинки чехла сделан специальный соединительный шов в виде липучек, который и позволяет «окутать» спинку, чтобы ремень безопасности оказался так же поверх чехла. Это сделано с учетом того, что не у каждого водителя есть набор звездочек, ну а простые ключи наверняка найдутся.
Все подлокотники на задних спинках практически сделаны одинаково, так же как и сами чехлы – на молниях. Если на сам подлокотник предусмотрен чехольчик, и в нем есть подстаканник, то есть возможность обработанное («обшитое») отверстие заправить (туго с отверткой) под пластмассу самого подстаканника, что даст вид «родной» обивки.
Когда Вы одели передний и задний ряд сидений, остались только подголовники, которые одеть не совсем простое дело. Если делать лекала более свободными, то получится эффект «варежки», а в данном случае должны получиться аккуратные «перчаточки» – тугие и в обтяжку. Именно такое сравнение подойдет к подголовникам. Передние и задние подголовники одеваются в сжатом состоянии, буквально сантиметр за сантиметром, при этом надо успевать расправлять все швы. В итоге Вы обязательно будете довольны результатом!
Эта общая подробная инструкция по установке авточехлов от Российской швейной группы «АВТОПИЛОТ» составлена в помощь покупателю и должна в полной мере обеспечить Вас всей необходимой информацией! В дальнейшем, инструкция будет постоянно дополняться разными нюансами, которые могут встретиться при установке в разных салонах автомобилей. Задуманное модельером-конструктором должно быть грамотно отшито швеями и без проблем установлено на сидения автомобиля, чтобы результат долго радовал Вас. Удачи Вам!
Установка меховых накидок:

- Manuals
- Brands
- MyFlyDream Manuals
- Remote Control
- Crosshair AutoPilot
- Manual
-
Contents
-
Table of Contents
-
Bookmarks
Quick Links
MyFlyDream
Crosshair AutoPilot
Manual V1.02 beta
(This manual is a beta version.
Many new functions of Crosshair AP have not been described here yet.
Please check our website frequently to get a new update version)
www.MyFlyDream.com
Copyright © 2010 MyFlyDream. Translated with the help of FPV Model, MFD authorized reseller
Summary of Contents for MyFlyDream Crosshair AutoPilot
-
Page 1
(This manual is a beta version. Many new functions of Crosshair AP have not been described here yet. Please check our website frequently to get a new update version) www.MyFlyDream.com Copyright © 2010 MyFlyDream. Translated with the help of FPV Model, MFD authorized reseller… -
Page 2
Thank you for purchasing the MyFlyDream CROSSHAIR AutoPilot (hereinafter referred to as AP). Notes and Disclaimer Please follow this manual to get familiar with th e AP and to operate it correctly. The AP is a precision electronic device. Read this manual carefully to avoid damaging the device, yourself, other people, your aircraft and other property. -
Page 3
Current Sensor 50A(default)/100A USB-TTL Firmware Updater The MFD Crosshair Autopilot is equipped with dual built-in three-axis gyroscopes, three-axis accelerometers, three-axis digital compass, and a barometer. One of the autopilot’s two dedicated processors is used to compute and control the attitude of the model aircraft, while another processor handles the OSD (on screen display) images and flight logic. -
Page 4
Advanced Features: 1) Full attitude AHRS, dual backed up gyroscope and accelerometer, maximum rolling rate up to 2000°/s. 2) Built-in 30fps color video signal generator displaying OSD interface on black background in case camera signal is lost or camera is not connected. 3) 600 TV lines resolution color OSD with an easily readable flight interface presenting the flight information both numerically and graphically. -
Page 5: Wiring And Connections
2. WIRING AND CONNECTIONS The pins are grouped into A through E connectors based on their functions as shown in the chart above. Connections to other parts:…
-
Page 6
7~26v input Ground cable MFD Crosshair Autopilot supports 7 to 26V input. However, as the camera and TX are directly powered from the flight controller, we recommend to use 12V to power the flight controller. 12V power can be obtained from an optional MFD 12V DC-DC power module, or from a 3s battery; in this case the AP will provide 12V directly to the camera and Vtx. -
Page 7
D) EXT Connector D is for the extension cable. USED FOR Video IN (Connect to Camera) Power Out (Same as power supply voltage of AP) +5V Out SDIO CLK (TF Card Clock) SDIO CMD (TF Card Command) SDIO D0 (TF Card Data) CAN RX (CAN-BUS L) CAN TX (CAN-BUS H) UART_A RX… -
Page 8
Extension cables (see above picture) are clustered to the connector D of the Autopilot. CONNECTOR USED FOR PWM Input Channel 1, connecting the aileron channel of the radio Rx. PWM input 2~6 channels are connected to channels 2 to 6 of the radio Rx. Channels 1~6 are for PWM. -
Page 9: Pwm Output
E) PWM OUTPUT Connector E provides the output signal to servos/ESCs to control the aircraft. The white wire is for signal, the red wire is for powering the servos (AP doesn’t supply the servo power), and the black wire is for GND. USED FOR Aileron servo, or the left rudder of the flying wing and V-tail aircraft.
-
Page 10: Installation
As most parameter settings need to be done thru OSD menu, for the first calibration we recommend connecting the AP video output directly to a monitor. ↘ When Crosshair Autopilot detects the video signal loss, it automatically switches to Internal synchronous video signal mode, showing the OSD image on black background.
-
Page 11
How to enter the OSD menu THR, CH5 and CH6 in LOW, move ELE to the bottom-right corner, wait for 2 seconds or longer until the OSD prompts “Enter menu?”. Then switch the CH5 to HIGH to enter OSD menu mode. How to exit the OSD menu … -
Page 12
Because every plane has its characters, these settings are only for reference. There are 3 types of plane available: NORMAL/WING/V-TAIL Select the type of you plane if via OSD menu PLANE SETTINGS->PLANE TYPE Especially we need to point out that loading settings from a pre-set model will not modify your servos REVERSED settings. -
Page 13
Plane banks to the right: left aileron moves upward, the right one moves downward Plane nose up: elevator move downward If any control surface moves to an unexpected direction, go to PLANE SETTINGS OSD menu, reverse the corresponding channel (AIL,ELE or RUD). For instance if when the plane nose up, elevator goes upward, you have to reverse the PLANE SETTINGS->ELE status. -
Page 14: Osd Layout
AIL stick to the right to execute the calibration. The AP will start to calibrate itself and display some information on OSD. Wait for a while until the timer counts down to zero. Move AIL to left to exit the calibration. These parameters are calibrated during the COMMON CALIBRATION: 1.
-
Page 15
are 90,180,270. When the plane’s speed is greater than 5km/h the heading data comes from the GPS. When the speed is less than 5Km/H, the heading data comes from the combination of GPS and internal compass. The number of satellites that GPS locked. RSSI, receiver signal strength. -
Page 16
18. Battery voltage (In Volt). This data is read from the current sensor. The gauge shows the remained battery life. To match the battery that you are using, you need to config the battery type via OSD menu SENSORS SETTINGS->BATTERY TYPE. The AP will assume that 4.2v is the voltage of a fully charged single cell battery. -
Page 17
According to the above picture, our friend is at 9 O’clock, flying to almost the opposite direction with us. Our distance is 123m, and it’s 115m below us. To use this function you need 2 or more MFD AAT system and connect them together. 2. -
Page 18
The throttle is controlled by AP in RTH mode. Please follow the following procedure in the test fly: 1) Switch the AP to MAN (manual mode), fly it as a normal RC plane. Check the plane CG and the control surface before you fly it. Trim the plane if the plane is not able to fly level and straight. -
Page 19: Osd Menu System
3) Next is to test RTH function. You have to set home before take off. If you don’t set home the OSD will show N/A instead of a target distance reading. Once you engage RTH mode in this situation, AP will load in the last HOME location and display a warning message.
-
Page 20
1. AUTO-PILOT SETTINGS [Settings about automatic flying] 1.1 *MAX-ROLL Maximum roll angle, in degrees. This is the maximum roll angle AP can use maneuverability except in MAN mode. Increase this parameter will increase the of the plane, but a too big value will cause unstable flying or crash. Recommended value is 20~45 degrees. 1.2 *MAX PITCH-UP Maximum pitch up angle, in degrees. -
Page 21
not able to track the flying path well. 1.14 CRUISE-D Cruising damping, use to reduce the above oscillating heading in auto-fly. 1.15 ALT-P Altitude gain. The bigger the value, the faster the plane try to achieve the altitude. A too high value will cause to pitch up/down oscillating. A too small value will cause the plane not able to maintain its altitude. -
Page 22
2.5 *ROLL-TRIM in degrees. Use this parameter to compensate the AP installing error in roll. You can adjust this parameter to trim the plane’s roll attitude. For example, the plane rolls to the left a bit in STB mode, you should increase this ROLL-TRIM to make the plane to roll to the right a bit. -
Page 23: Osd Settings
ELE and RUD output of the AP in this case. AP will mix the ELE/RUD controls, do not use any mix for v-tail models on your transmitter. AP will set the PLANE TYPE when you load parameters via SAVE/LOAD->LOAD PRE-SET 2.11 CH5=H,CH6=M Define the mode AP will use when CH5=HIGH, CH6=MID.
-
Page 24: Sensors Settings
Selecting ROLL/PITCH will show (top to bottom): Roll angle (negative numbers mean rolling to the left, positive numbers means rolling to the right) / Pitch angle (negative numbers mean diving, positive numbers mean climbing) Selecting LON/LAT will show (top to bottom): Altitude (ASL) / Longitude (LON) / Latitude (LAT) …
-
Page 25: Misc. Settings
MAX and execute it when your RX has the best signal strength. Then move to MIN and execute it. Turn off your transmitter now to make sure the RX has the worst signal strength. Make sure your RX Failsafe outputs CH5=H to avoid quitting menu system when you turn off the TX. (Usually we set F/S to CH5=H and CH6=H, so it should not be a problem).
-
Page 26
R/P: Adjust ROLL-P and PITCH-P C/A: Adjust CRUISE-P and ALT-P Once this option is activated you can use CH7 and CH8 to adjust the parameters anytime. For example, if you set this option to R/P, you can use CH7 to adjust ROLL-P and use CH8 to adjust PITCH-P. -
Page 27: Ground Station
Set OSD menu MISC->DATA RADIO to a proper baudrate, for example 9600. Run the APM Mission Planner (it’s an open source GCS which is also available on www.MyFlyDream.com). Select corresponding COM port, then click the icon on the upper-left corner After we connect to the AP successfully, click the «Flight Plan»…
-
Page 28
Now you can place some way points on the map with your mouse. Make sure you set the correct altitude for the way points. AP can handle maximum 20 way points. When all way points are defined, click «Write WPs» button on the bottom-right corner to upload the way points to AP. -
Page 29: Firmware Upgrade
More parameters will appear here in the future. 8. Firmware upgrade MyFlyDream will continue to improve the firmware to fix bugs and get better performance. Unless a warning message is given in the firmware update history, no setting will be erased…
-
Page 30
COM port number that assigned by the system. For example it is COM4 as shown in the picture below. Plug the USB-TTL blue connector in the GPS port of AP (Also blue) 3. Download the update program: http://www.myflydream.com/inc/lib/download/download.php?DId=43 Run the MFD_Update.exe program. Select corresponding COM port. 4. Download the most update firmware:… -
Page 31
Click «Select File», Select the firmware file downloaded from our website. 6. Click «Update». Wait until complete. 9.FAQ Q: Why I can’t see OSD on my monitor? A: You need to feed video signal (from a camera) to MFD AP to get video output. -
Page 32
Q: Why it can’t lock heading direction when I am in ALT mode and release all sticks? A: use SENSORS SETTINGS->CAL. JOYSTICK to let the AP know the neutral points of your radio. Q: Why the plane is not able to reach the target altitude in ALT/RTH/WPT/CIR modes? A: First you need to make sure the plane can fly almost levelly in MAN mode.
Время на прочтение
7 мин
Количество просмотров 22K
Привет, Хабр. Это пост-отчет-тьюториал про беспилотные автомобили — как (начать) делать свой без расходов на оборудование. Весь код доступен на github, и помимо прочего вы научитесь легко генерить такие класные картинки:
Поехали!
Вкратце
Краткое содержание для знакомых с темой: традиционно для набора обучающей выборки для автопилота на основе машинного обучения нужен был специально оборудованный автомобиль с достаточно информативной CAN шиной и интерфейсом к ней, что дорого. Мы поступим проще и бесплатно — будем набирать такие же по сути данные просто со смартфона на лобовом стекле. Подходит любой авто, никаких модификаций оборудования. В этой серии — вычисляем поворот руля в каждый момент времени по видео. Если в этом абзаце всё понятно, можно перепрыгивать через введение сразу к сути подхода.
Что-зачем-почему более подробно
Итак, ещё пару лет назад без серьёзных ресурсов большой корпорации в тему автопилотов было не сунуться — один только LIDAR сенсор стоил десятки тысяч долларов, но недавняя революция в нейросетях всё изменила. Стартапы из нескольких человек с простейшими наборами сенсоров из пары вебкамер на равных конкурируют по качеству результата со знаменитыми брендами. Почему бы не попробовать и нам, тем более столько качественных компонентов уже в открытом доступе.
Автопилот преобразует данные сенсоров в управляющие воздействия — поворот руля и требуемое ускорение/замедление. В системе с лазерными дальномерами, как у Google, это может выглядеть так:
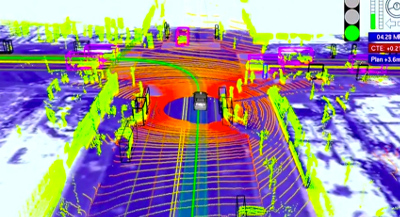
Простейший же вариант сенсора — видеокамера, «смотрящая» через лобовое стекло. С ним и будем работать, ведь камера на телефоне уже есть у каждого.

Для вычисления управляющих сигналов из «сырого» видео хорошо работают сверточные нейросети, но, как и любой другой подход машинного обучения, предсказывать правильный результат их нужно научить. Для обучения нужно (а) выбрать архитектуру модели и (б) сформировать обучающую выборку, которая будет демонстрировать модели различные входные ситуации и «правильные ответы» (например, угол поворота руля и положение педали газа) на каждую из них. Данные для обучающей выборки обычно записывают с заездов, где машиной управляет человек. То есть водитель демонстрирует роботу, как надо управлять машиной.
Хороших архитектур нейросетей хватает в открытом доступе, а вот с данными ситуация более печальная: во-первых данных просто мало, во-вторых почти все выборки — из США, а у нас на дорогах много от тех мест отличий.
Дефицит открытых данных легко объясним. Во-первых данные — не менее ценный актив, чем экспертиза в алгоритмах и моделях, поэтому делиться никто не торопится:
The rocket engine is the models and the fuel is the data.
Andrew Ng
Во-вторых, процесс сбора данных недёшев, особенно если действовать «в лоб». Хороший пример — Udacity. Они специально подобрали модель автомобиля, где рулевое управление и газ/тормоз завязаны на цифровую шину, сделали интерфейс к шине и считывают оттуда данные напрямую. Плюс подхода — высокое качество данных. Минус — серьезная стоимость, отсекающая подавляющее большинство непрофессионалов. Ведь далеко не каждый даже современный авто пишет в CAN всю нужную нам информацию, да и с интерфейсом придется повозиться.
Мы поступим проще. Записываем «сырые» данные (пока что это будет просто видео) смартфоном на лобовом стекле как видеорегистратором, затем софтом «выжимаем» оттуда нужную информацию — скорость движения и поворотов, на которых уже можно будет обучать автопилот. В результате получаем почти бесплатное решение — если есть держалка для телефона на лобовое стекло, достаточно нажать кнопку, чтобы набирать обучающие данные по дороге на работу.
В этой серии — «выжималка» угла поворота из видео. Все шаги легко повторить своими силами с помощью кода на github.
Задача
Решаем задачу:
- Есть видео с камеры, жестко закрепленной к авто (т.е. камера не болтается).
- Требуется для каждого кадра узнать текущий угол поворота руля.
Ожидаемый результат:
Сразу чуть упростим — вместо угла поворота руля будем вычислять угловую скорость в горизонтальной плоскости. Это примерно эквивалентная информация если знать поступательную скорость, которой мы займемся в следующей серии.
Решение
Решение можно собрать из общедоступных компонент, немного их доработав:
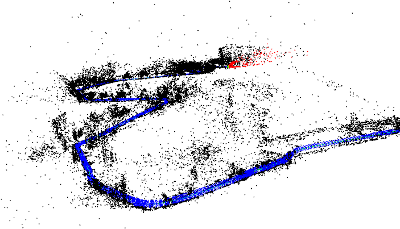
Восстанавливаем траекторию камеры
Первый шаг — восстановление траекториии камеры в трехмерном пространстве с помощью библиотеки SLAM по видео (simultaneous localization and mapping, одновременная локализация и построение карты). На выходе для каждого (почти, см. нюансы) кадра получаем 6 параметров положения: 3D смещение и 3 угла ориентации.
В коде за эту часть отвечает модуль optical_trajectories
Нюансы:
- При записи видео не гонитесь за максимальным разрешением — дальше определенного порога оно только повредит. У меня хорошо работают настройки в окрестностях 720х480.
- Камеру нужно будет откалибровать (инструкции, теория — актуальны части 1 и 2) на тех же настройках, с которыми записывалось видео с заезда.
- Системе SLAM нужна «хорошая» последовательность кадров, за которую можно «зацепиться» как за точку отсчета, поэтому часть видео в начале, пока система не «зацепится» останется не аннотированным. Если на вашем видео локализация не работает совсем, вероятны либо проблемы с калибровкой (попробуйте откалибровать несколько раз и посмотрите на разброс результатов), либо проблемы с качеством видео (слишком высокое разрешание, слишком сильное сжатие и т.д.).
- Возможны срывы отслеживания SLAM системой, если между соседними кадрами потеряется слишком много ключевых точек например, стекло на мгновение залило всплеском из лужи). В этом случае система сбросится в исходное не локализованное состояние и будет локализовываться заново. Поэтому из одного видео можно получить несколько траекторий (не пересекающихся во времени). Системы координат в этих траекториях будут совершенно разными.
- Конкретная библиотека ORB_SLAM2, которой я воспользовался, дает не очень надежные результаты по поступательным перемещениям, поэтому их пока игнорируем, а вот вращения определяет неплохо, их оставляем.
Определяем плоскость дороги
Траектория камеры в трехмерном пространстве — это хорошо, но напрямую еще не дает ответа на конечный вопрос — поворачивать налево или направо, и насколько быстро. Ведь у системы SLAM нет понятий «плоскость дороги», «верх-низ», и т.д. Эту информацию тоже надо добывать из «сырой» 3D траектории.
Здесь поможет простое наблюдение: автомобильные дороги обычно протягиваются гораздо дальше по горизонтали, чем по вертикали. Бывают конечно исключения, ими придется пренебречь. А раз так, можно принять ближайшую плоскость (т.е. плоскость, проекция на которую дает минимальную ошибку реконструкции) нашей траектории за горизонтальную плоскость дороги.
Горизонтальную плоскость выделяем прекрасным методом главных компонент по всем 3D точкам траектории — убираем направление с наименьшим собственным числом, и оставшиеся два дадут оптимальную плоскость.
За логику выделения плоскости также отвечает модуль optical_trajectories
Нюанс:
-
Из сути главных компонент понятно, что кроме горных дорог выделение главной плоскости будет плохо работать если машина всё время ехала по прямой, — ведь тогда только одно направление настоящей горизонтальной плоскости будет иметь большой диапазон значений, а диапазон по оставшемуся перпендикулярному горизонтальному направлению и по вертикали будут сопоставимы.
Чтобы не загрязнять данные большими погрешностями с таких траекторий, проверяем, что разброс по последнему главному компоненту значительно (в 100 раз) меньше, чем по предпоследнему. Не прошедшие траектории просто выкидываем.
Вычисляем угол поворота
Зная базисные векторы горизонтальной плоскости v1 и v2 (два главных компонента с наибольшими собственными значениями из предыдущей части), проецируем на горизонтальную плоскость оптическую ось камеры:

Таким образом из трехмерной ориентации камеры получаем курсовой угол автомобиля (с точностью до неизвестной константы, т.к. ось камеры и ось автомобиля в общем случае не совпадает). Поскольку нас интересует только интенсивность поворота (т.е. угловая скорость), эта константа и не нужна.
Угол поворота между соседними кадрами дает школьная тригонометрия (первый множитель — абсолютная величина поворота, второй — знак, определяющий направление налево/направо). Здесь под at понимаем вектор проекции ahorizontal в момент времени t:

Эта часть вычислений тоже делается модулем optical_trajectories. На выходе получаем JSON файл следующего формата:
{
"plane": [
[ 0.35, 0.20, 0.91],
[ 0.94, -0.11, -0.33]
],
"trajectory": [
...,
{
"frame_id": 6710,
"planar_direction": [ 0.91, -0.33 ],
"pose": {
"rotation": {
"w": 0.99,
"x": -0.001,
"y": 0.001,
"z": 0.002
},
"translation": [ -0.005, 0.009, 0.046 ]
},
"time_usec": 223623466,
"turn_angle": 0.0017
},
.....
}
Значения компонент:
plane— базисные векторы горизонтальной плоскости.trajectory— список элементов, по одному на каждый успешно отслеженный системой SLAM кадр.frame_id— номер кадра в исходном видео (начиная с 0).planar_direction— проекция отпической оси на горизонтальную плоскостьpose— положение камеры в 3D пространствеrotation— ориентация оптической оси в формате единичного кватерниона.translation— смещение.
time_use— время с начала видео в микросекундахturn_angle— горизонтальное вращение относительно предыдущего кадра в радианах.
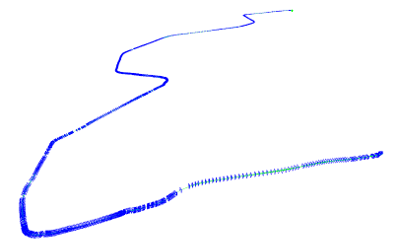
Убираем шум
Мы почти у цели, но остается еще проблема. Посмотрим на получившийся (пока что) график угловой скорости:
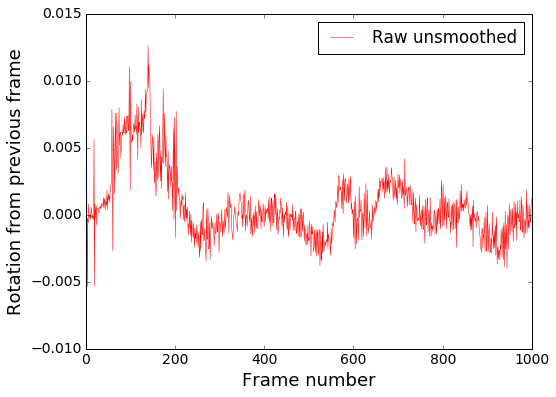
Визуализируем на видео:
Видно, что в общем направление поворота определяется правильно, но очень много высокочастотного шума. Убираем его Гауссовским размытием, которое является низкочастотным фильтром.
Сглаживание в коде производится модулем smooth_heading_directions
Результат после фильтра:
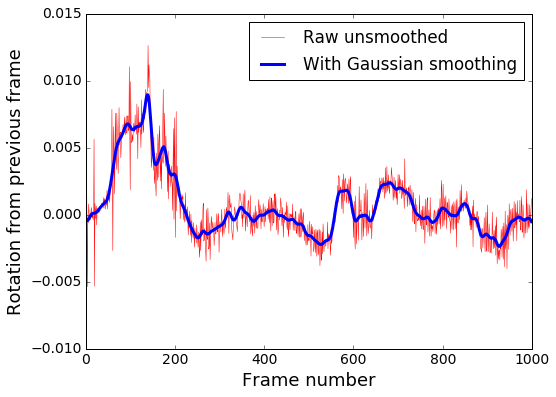
Это уже можно «скормить» обучаемой модели и рассчитывать на адекватные результаты.
Визуализация
Для наглядности по данным из JSON файлов траекторий можно наложить виртуальный руль на исходное видео, как на демках выше, и проверить, правильно ли он крутится. Этим занимается модуль render_turning.
Также легко построить покадровый график. Например, в IPython ноутбуке с установленным matplotlib:
import matplotlib
%matplotlib inline
import matplotlib.pyplot as plt
import json
json_raw = json.load(open('path/to/trajectory.json'))
rotations = [x['turn_angle'] for x in json_raw['trajectory']]
plt.plot(rotations, label='Rotations')
plt.show()На этом пока всё. В следующей серии — определяем поступательную скорость, чтобы обучить еще и управление скоростью, а пока что приветствуются pull-request’ы.
Машина с автопилотом считается транспортом следующего поколения и мечтой многих автолюбителей: ведь чтобы добраться до нужно места, не нужно будет крутить руль. Сиди себе в салоне и спи, автомобиль доедет до нужного места сам.
На самом деле, автопилот для гражданских авто существует уже сейчас. Машины под управлением искусственного интеллекта можно встретить даже на дорогах Москвы, но как это все работает?
Рассказываем всю правду про современные беспилотные машины.
Какие бренды делают авто с автопилотом

Машина с автопилотом от американского стартапа.
Единой системы автопилота нет, потому что в 2010-х годах многие крупные автомобильные бренды начали разработку собственного беспилотного программного обеспечения.
Систему датчиков для анализа дороги и препятствий можно установить практически на любую машину. Так что у ведущих автопроизводителей нет какой-то специальной модели авто для тестирования автопилота.
Основой любого авто с беспилотным управлением является искусственный интеллект, который должен мгновенно принимать решения, учитывая поступающие данные с датчиков и камер, установленных по всей машине.
На сегодняшний день автопилот разрабатывают и тестируют следующие производители:
▪️ General Motors
▪️ Ford
▪️ Mercedes Benz
▪️ Volkswagen
▪️ Audi
▪️ Nissan
▪️ Toyota
▪️ BMW
▪️ Volvo
▪️ Tesla
Автопилот тестирует даже Apple. Правда не слишком хвастается результатами. В прошлом году ее автопилот признали худшим из имеющихся в США.
Куда лучше дела у Google. Для них умное авто разрабатывает компания Waymo, дочернее предприятие Alphabet.

У Яндекса тоже есть свои беспилотные авто на базе Toyota Prius. Каждый такой беспилотник обходится компании примерно в $90 000, из них $30 000 – стоимость самой машины.
Цену увеличивают те самые модули для автономной езды и сертификация, о которой мы поговорим позже.
Беспилотные авто реально сами ездят? На самом деле нет

Так видит дорогу автопилот автомобиля.
В идеале машина с автопилотом работает автономно, то есть водителю не нужно жать на педали и перехватывать управление даже в сложных дорожных ситуациях. Но это пока лишь в теории.
У Tesla на сегодняшний день самый продвинутый по своей функциональности автопилот, но даже он официально называется «интеллектуальный помощник водителя». То есть полностью доверить ему управление авто ещё нельзя.
Общество инженеров автомобильной промышленности (SAE) выделяет шесть степеней автономность машин. Полная автономность – это последняя, шестая степень. С таким автопилотом водитель лишь задает конечный пункт маршрута, а процесс передвижения полностью ложится на программное обеспечение.
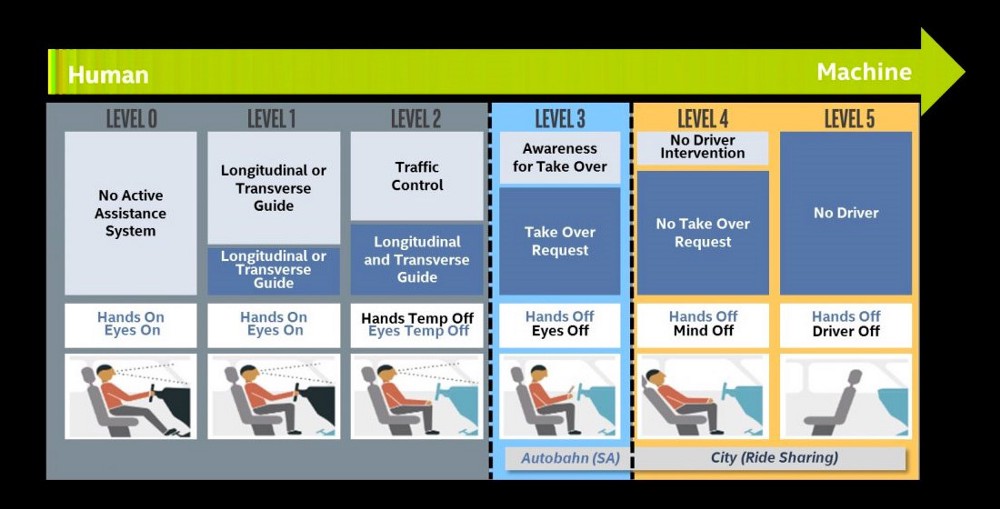
Все 6 степеней автономности машин по версии Общества инженеров автомобильной промышленности.
Сегодня на дорогах общего пользования можно встретить машины с функцией беспилотного управления третьего уровня автономности. Пока это максимум, до чего дошли автопроизводители.
В недалёком будущем машины с автопилотом 6-й степени автономности обязательно появятся. А пока за рулем обязательно должен сидеть человек для перехвата управления, если система не справляется.
Что умеют беспилотные авто сегодня
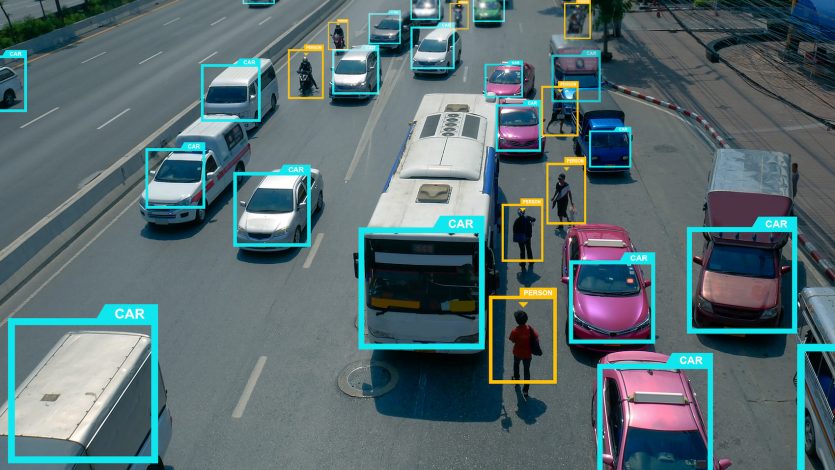
Дорога «глазами» искусственного интеллекта.
Искусственный интеллект автопилота в наше время может не только анализировать динамичную дорожную обстановку в реальном времени, но и «узнавать» людей, животных и неодушевлённые преграды.
Это не говоря о распознавании дорожной разметки, сигналов светофора и дорожных знаков.

Для этого программа постоянно анализирует данные с датчиков, которых можно разделить на 4 вида:
Камеры. Отвечают за визуальное обнаружение объектов, например, дорожная разметка и знаки
Радар. Определение препятствий и объектов впереди и сзади, а также определение расстояния до них
Лидар. Похож на радар, но работает с углом обзора 360 градусов и распознает объекты вокруг на расстоянии до 60 метров
Датчик положения. Вмонтирован в колесо, определяет положение машины на карте.
Искусственный интеллект анализирует информацию с разных датчиков, и вот как это выглядит в реале:
Бортовой компьютер соединяет информацию, полученную от сенсора, с находящейся в памяти картой местности. Собранные данные хранятся в общей базе, чтобы ими могли пользоваться другие машины.
Беспилотник должен собрать очень много данных, и эти данные должны собираться не на полигоне и даже не в одном конкретном месте, а во всем городе – везде, где есть свободное движение. Чем больше беспилотников, тем больше данных, тем безопаснее технология.
Как тестируются беспилотные машины
Беспилотный транспорт тестируется на специальных полигонах. В России самым известным стал технопарк «Калибр» на улице Годовикова в Останкинском районе Москвы. Кроме него в стране насчитывается несколько десятков таких технопарков.
На полигонах автомобили тестируют прежде всего на взаимодействие с дорожной инфраструктурой и с пешеходами на зебрах. На таких испытаниях выясняются печальные подробности: автопилот Tesla удалось обмануть с помощью дешевого проектора.
Испытатели проецировали различные двумерные изображения, а система воспринимала их как реальные объекты.

Если авто проходит этот этап, начинается следующий – в реальных условиях на шоссе. Во время таких испытаний в салоне находится пилот-испытатель, чтобы перехватить управление, если искусственный интеллект не справляется.
На дорогах Москвы беспилотники появились в июне 2019 года. Машины курсируют по специальным зонам для тестирования. Перед выходом на дорогу общего пользования Москвы первый беспилотник прошел сертификацию на полигоне НАМИ.
Как сертифицируются машины с автопилотом

Перед выходом на дорогу беспилотный автомобиль получает сертификацию о прохождении испытаний высокоавтоматизированных транспортных средств (ВАТС).
Она представляет собой проверку исправности комплектующих. По сути, сертификация дублирует испытания, которые проходит любой автомобиль перед тем как выйти на рынок.
В России беспилотник проходит сертификацию и на этапе тестирования. В США на этот период она не требуется — сразу после выхода с конвейера и оснащения всеми необходимыми датчиками автомобиль выезжает на трассу общего пользования.
Глава направления беспилотных автомобилей «Яндекса» Дмитрий Полищук говорит, что этот процесс мало чем отличается от сертификации обычного автомобиля. Регуляторы проверяют преимущественно тормозную систему, стояночный тормоз, поворотники, фары, а к беспилотной технологии прямого отношения это не имеет.
Проверить искусственный интеллект на пригодность к вождению, по его словам, невозможно.
В свободной продаже автомобилей с беспилотным управлением в России в ближайшее время не будет. Все машины ездят в рамках тестов и испытаний.
А кто будет виноват, в случае ДТП с участием беспилотного авто в России?

Машина Яндекс.Такси со встроенным автопилотом на испытательном полигоне.
Так как автомобили с функцией автопилота пока ездят в тестовом режиме по дорогам России, этот вопрос ещё не обсуждался официально.
Все беспилотные автомобили в России обязательно страхуются сейчас на 10 млн руб. Так что страховка покроет ущерб от практически любого ДТП с участием машины без водителя за рулем.
В то же время в Великобритании готовится проект «Vehicle Technology and Aviation Bill», в котором есть пункты касательно ДТП с участием беспилотного транспорта:
?? Если в момент оформления страхового полиса страховая компания была проинформирована о том, что транспортное средство будет использоваться в режиме автопилота, тогда она несет полную ответственность по застрахованному авто.
?? Если беспилотный автомобиль не застрахован, тогда в случае аварии ответственность будет нести автовладелец.
?? Если аварийная ситуация возникла по причине сбоя в программном обеспечении или оборудовании, тогда вина ложится на плечи компании-производителя.
?? Если авария стала следствием вмешательства автовладельца в ПО или собственник не выполнил указания производителя (например, не провел обновление программного обеспечения вовремя), тогда страховщик может взыскать страховую выплату с автовладельца.
Так что к появлению частных полностью беспилотных машин общество почти готово.
Современному автопилоту ещё далеко до полностью автономной работы

Volvo с системой автопилота на крыше.
Сложно поспорить, что машины без водителя — транспорт будущего, хоть сейчас мы ещё далеки от изобретения полностью автономного автопилота.
На сегодняшний день тестирование таких машин слишком затратно, но в том же Яндексе уверены, что в будущем поездки на авто с ним окажутся дешевле, чем на такси.
Пока что искусственный интеллект слишком уязвим и непредсказуем. Его можно обмануть или сбить с толку.
Единственный способ его усовершенствовать — больше тестировать. Чем активнее этим будут заниматься компании, тем скорее машины с полностью автономным управлением войдут в обиход.

 (13 голосов, общий рейтинг: 4.85 из 5)
(13 голосов, общий рейтинг: 4.85 из 5)
🤓 Хочешь больше? Подпишись на наш Telegram.
![]()
iPhones.ru
Они уже ездят по городу, просто мы этого не замечаем.
- Это интересно
![]()