
ECD1 ПИД-регулятор

ECD2 ПИД-регулятор 2х канальный

ECV1 ПИД-регулятор для КЗР

ECD8-L Измеритель-регулятор 8ми канальный c функцией архивирования

ECD4-L Измеритель-регулятор 4х канальный c функцией архивирования

EWM Преобразователи сигналов тенезодатчиков

ELV1 Регулятор уровня жидкости многофункциональный

ELV3 Сигнализатор уровня 3х канальный

ELV-POOL Регулятор уровня воды для переливных бассейнов

EPL1 Контроллер управления насосами

ETC Таймер реального времени

ELHART: TRE-C термосопротивление c кабелем

ИГЛЫ

PTE5000С Датчик давления ELHART

HTE.PF датчики влажности и температуры

VLS-C Вибрационный сигнализатор уровня компактного исполнения

CLS.C01: Подвесной кондуктометрический датчик уровня

CLS.H01: Стержневой кондуктометрический датчик уровня, аксессуары

ELS Электромагнитный датчик уровня
![]()
UDB: датчик контроля двойного листа
![]()
UDS.12: Ультразвуковые датчики расстояния
![]()
UDS.18: Ультразвуковой датчик расстояния
![]()
UDS.30: Ультразвуковой датчик расстояния

EMD-MINI Преобразователь частоты

EMD-PUMP Преобразователь частоты для насосов

EMD-VL, EMD-VH Преобразователь частоты векторный

DCC Дроссель постоянного тока

MC Моторный дроссель

EMD-MINI — RCP Выносной пульт управления для ПЧ ELHART серии EMD-MINI

EMD-PUMP — RCP Пульт управления для ПЧ ELHART серии EMD-PUMP

LC Сетевой дроссель

ECP Панели оператора

ELP Панели оператора

BakeControl — Система управления хлебопекарными печами

КАСКАД КНС — Шкафы управления для систем водоотведения

КАСКАД 10 — Шкафы управления насосом

КОНТУР — Шкафы управления ИТП (расширенная версия)

КОНТУР-С0 — Шкафы управления одним контуром ИТП (отопление или ГВС)

КОНТУР Lite — Шкафы управления ИТП (базовая версия)

LevelMaster — Шкафы управления для контроля уровня в емкостях

PoolMaster 10 — Шкафы управления бассейном

ClimatMaster — Шкафы управления вентиляцией

ESS1-DA-mini Однофазное миниатюрное ТТР (3-32 VDC)

ESS1-DA DHT Компактное ТТР на DIN-рейку (4-32 VDC)

ESS1-AA Однофазное ТТР (90-250 VAC)

ESS1-LA Однофазное ТТР (4-20мА) 0-380 VAC

ESS1-UA S Однофазное ТТР (0-10 VDC)

ESS3-DA Трехфазное ТТР (3-32 VDC)

ESS3-AA Трехфазное ТТР (90-250 VAC)

ESS1-DA Однофазное ТТР (3-32 VDC)

ESS1-DD Однофазное ТТР (5-32 VDC)

ESS1-PA Однофазное ТТР (0-470/560 кОм) 10-440 VAC

ESH1-DA Однофазное силовое ТТР (3-32 VDC)

ESH1-DAH Однофазное силовое реле до 1200VAC (3-32 VDC)

Радиаторы охлаждения для SSR ELHART
EMD-MINI – 004 S Преобразователь частоты ELHART (0,4кВт, 2,5А, 220В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU, монтаж на DIN-рейку), серия EMD-MINI
EMD-MINI – 004 T Преобразователь частоты ELHART (0,4кВт, 1,5А, 380В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU, монтаж на DIN-рейку), серия EMD-MINI
EMD-MINI – 007 S Преобразователь частоты ELHART (0,75кВт, 5А, 220В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU, монтаж на DIN-рейку), серия EMD-MINI
EMD-MINI – 007 T Преобразователь частоты ELHART (0,75кВт, 2,7А, 380В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU, монтаж на DIN-рейку), серия EMD-MINI
EMD-MINI – 015 S Преобразователь частоты ELHART (1,5кВт, 7А, 220В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU, монтаж на DIN-рейку), серия EMD-MINI
EMD-MINI – 015 T Преобразователь частоты ELHART (1,5кВт, 4А, 380В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU, монтаж на DIN-рейку), серия EMD-MINI
EMD-MINI – 022 S Преобразователь частоты ELHART (2,2кВт, 11А, 220В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU, монтаж на DIN-рейку), серия EMD-MINI
EMD-MINI – 022 T Преобразователь частоты ELHART (2,2 кВт, 5А, 380В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU, монтаж на DIN-рейку), серия EMD-MINI
EMD-MINI – 037 T Преобразователь частоты ELHART (3,7 кВт, 8,6А, 380В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU, монтаж на DIN-рейку), серия EMD-MINI
EMD-MINI – 055 T Преобразователь частоты ELHART (5,5 кВт, 12,5А, 380В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU, монтаж на DIN-рейку), серия EMD-MINI
EMD-MINI – 075 T Преобразователь частоты ELHART (7,5 кВт, 17,5А, 380В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU), серия EMD-MINI
EMD-MINI – 110 T Преобразователь частоты ELHART (11 кВт, 24А, 380В, встр. ПИД-регулятор, 4 дискр. входа (NPN), 1 дискр. выход (реле НО, 250В, 3А),1 аналоговый вход 4-20мА/0-10В, поворотный задатчик частоты, RS-485 Modbus RTU), серия EMD-MINI
Содержание
- Реализация управления пуском, остановом, реверсом и скоростью вращения ПЧ Elhart EMD-Mini с внешних кнопок / переключателей
- 1. Способы подачи сигналов управления на частотный преобразователь
- 2. Двухпроводная схема подключения ЧП с использованием контактов с фиксацией
- Режим 1
- Режим 2
- 3. Трехпроводная схема подключения ЧП с использованием контактов без фиксации
- Режим 1
- Режим 2
- 4. Задание частоты
- Задание частоты встроенными кнопками «Вверх/Вниз» (предустановленная выходная частота)
- Задание частоты командами «Больше/Меньше»
- 5. Устранение типовых неполадок в работе частотного преобразователя
Реализация управления пуском, остановом, реверсом и скоростью вращения ПЧ Elhart EMD-Mini с внешних кнопок / переключателей
1. Способы подачи сигналов управления на частотный преобразователь
Преобразователь частоты ELHART EMD-Mini имеет встроенную несъемную панель управления. С этой панели доступен весь функционал частотника (настройки, управление). По умолчанию частотный преобразователь настроен на управление двигателем со встроенной панели (кнопка RUN/STOP, встроенный потенциометр). Потенциометр настроен на регулировку частоты от 0 до 50 Гц (максимальной частоты).
 Рисунок 1 — Преобразователи частоты ELHART EMD-MINI
Рисунок 1 — Преобразователи частоты ELHART EMD-MINI
Управление частотным инвертором со встроенной панели имеет свои недостатки:
- Так как преобразователь предназначен для установки в шкаф управления, то для доступа к встроенной панели необходимо каждый раз открывать дверь шкафа (в случае работы в пыльном производстве — мука, пыль, цемент — частое открытие двери недопустимо). Кроме того, часто частотник устанавливается рядом с двигателем, а пульт оператора находится в стороне.
ПЧ ELHART позволяет настроить подачу команд управления со встроенной панели, интерфейса RS-485, а так же на программируемых дискретных входах, в этом материале речь пойдет именно о них.
Указания по монтажу сигналов управления к частотному преобразователю:
- Управляющий кабель должен быть размещен отдельно от кабелей силовой части.
- Применяйте для подключения к дискретным входам только высококачественные коммутационные элементы, исключающие дребезг контактов.
- Для предотвращения помех используйте экранированные провода с сечением 0,75 мм².
- Не подавайте внешнее напряжение на клеммы управляющих сигналов.
- Максимальная длина управляющих цепей 30 м.
В частотном инверторе EMD-MINI есть 4 программируемых дискретных входа FWD, REV, S1 и S2. Принципиальных отличий между входами нет, так как функции настроек для всех входов даны одинаковы. Для управления с дискретных входов необходимо использовать переключатели типа «сухой контакт» (кнопка, концевик, релейный выход). Если источник управления встроенная панель — пуск, останов, смена направления движения с дискретных входов невозможна. Если источник управления дискретные входы, пуск со встроенной панели невозможен.
Кнопку «Стоп» на панели частотника можно заблокировать (Р103=0 — кнопка заблокирована, Р103=1 — кнопка активна). По умолчанию кнопка активна. Возможно подключение кнопок управления по двухпроводной и трехпроводной схеме.
2. Двухпроводная схема подключения ЧП с использованием контактов с фиксацией
Режим 1
Таблица 1 — Работа ПЧ в режиме 1 (контакты с фиксацией)
| Состояние входных сигналов | Режим работы | |
|---|---|---|
| К1 | К2 | |
| Вкл | Выкл | Вращение в прямом направлении |
| Выкл | Вкл | Вращение в обратном направлении |
| Выкл | Выкл | Стоп |
| Вкл | Вкл | Стоп |
- Р102=1 — Источник команд управления = программируемые дискретные входы;
- Р315=6 — Вход FWD = вращение в прямом направлении;
- Р316=7 — Вход REV = вращение в обратном направлении.
В схеме можно применить переключатель «Джойстик» EMAS CP101DJ20 на 2 направления с фиксацией. (2НО). Среднее положение — стоп, или переключатель с фиксацией II-0-I EMAS B101S30
Режим 2
Таблица 2 — Работа ПЧ в режиме 2 (контакты с фиксацией)
| Состояние входных сигналов | Режим работы | |
|---|---|---|
| К1 | К2 | |
| Вкл | Выкл | Вращение в прямом направлении |
| Вкл | Вкл | Вращение в обратном направлении |
| Выкл | Выкл | Стоп |
| Выкл | Вкл | Стоп |
- Р102=1 — Источник команд управления = программируемые дискретные входы;
- Р315=6 — Вход FWD = вращение в прямом направлении;
- Р316=4 — Вход REV = изменение направления вращения.
В этой схеме пока замкнут контакт К1 двигатель вращается. Если К2 разомкнут — вращение происходит в прямом направлении, если К2 замкнут — в обратном. В схеме можно применить 2 переключателя с фиксацией 0-I, например, переключатель B100S20, B100C, или тумблер МА111.
3. Трехпроводная схема подключения ЧП с использованием контактов без фиксации
Режим 1
- Р102=1 — Источник команд управления = программируемые дискретные входы;
- Р315=8 — Вход FWD = сигнал «Стоп» (контакт НЗ);
- Р317=6 — Вход S1 = вращение в прямом направлении;
- Р318=7 — Вход S2 = вращение в обратном направлении.
В схеме могут быть применены 2 кнопки без фиксации B100DH для запуска вращения и кнопка красная с НЗ контактом, например, кнопка B200DK для остановки.
Также для запуска можно применить переключатель без фиксации II-0-I B101S32 или переключатель «Джойстик» CP101DJ21 на 2 направления без фиксации. Переключение влево — вращение в одну сторону, вправо — в другую.
Режим 2
- Р102=1 — Источник команд управления = программируемые дискретные входы;
- Р315=8 — Вход FWD = сигнал «Стоп» (контакт НЗ);
- Р317=5 — Вход S1 = команда «Пуск» (НО);
- Р318=4 — Вход S2 = изменение направления вращения (кнопка НО с фиксацией).
В схеме может быть применена сдвоенная кнопка пуск/стоп EMAS B102K20KY. Где НЗ
контакт К3 — «Стоп», НО контакт К1 — «Пуск», НО контакт К2 — «Реверс» (переключатель с фиксацией, например, B100S20).
Контакт К2 не запускает двигатель, а лишь меняет направление вращения (в замкнутом состоянии). Параметр Р104 позволяет запретить реверс (по умолчанию разрешен).
Преобразователь частоты имеет возможность производить автостарт после подачи питания. Для этого необходимо в параметре Р416 установить 1 (автостарт разрешен). Также необходимо обеспечить постоянную подачу сигнала «ПУСК». Установить P102=1, то есть источником сигнала «ПУСК» будет дискретный вход и использовать кнопку с фиксацией для подачи сигнала на дискретный вход. Дискретный вход, на который будет подан сигнал «ПУСК», должен иметь функцию «5» либо «6» (см. P315-P318). Для автоматического запуска частотный преобразователь должен быть полностью выключен (при кратковременном пропадании питания ПЧ выдаст ошибку «Lu3» и не запустится).
Преобразователь частоты имеет возможность защиты от изменения параметров неквалифицированным персоналом. Если P118 =1, то все параметры заблокированы, параметры не могут быть изменены за исключением P100 (предустановленная выходная частота).
4. Задание частоты
Задание частоты возможно со встроенного потенциометра, внешними кнопками (больше/меньше), внешним потенциометром, сигналами 0-10 В, 4-20 мА, кнопками (больше/меньше) со встроенной панели, через интерфейс RS-485. Для использования внешнего потенциометра необходимо в качестве источника задания выходной частоты выбрать аналоговый сигнал 0..10 В (Р101=1). Внешний потенциометр для частотных преобразователей используется номиналом 5 либо 10 кОм. Рекомендуется использовать потенциометр EMAS BPR05K или BPR10K.
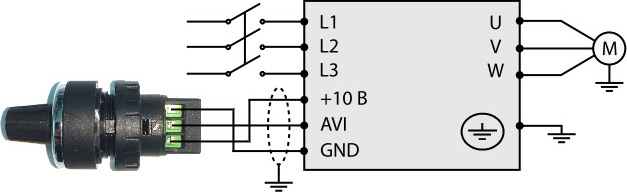 Рисунок 4 — Задание частоты сигналом 0. 10 В внешним потенциометром
Рисунок 4 — Задание частоты сигналом 0. 10 В внешним потенциометром
Подключая внешний потенциометр мы подаем на аналоговый вход сигнал от 0 до 10 В (потенциометр выступает в роли делителя напряжения). Если используется не весь диапазон частот (от 0 до Fmax), то можно настроить частоту при минимальном и максимальном сигнале потенциометра. Пример настройки на управление частотой в диапазоне 20-45 Гц (см. рис. 5).
 Рисунок 5 — График задания частоты
Рисунок 5 — График задания частоты
- Р310=20 (частота при минимальном сигнале);
- Р312=45 (частота при максимальном сигнале).
Также можно настроить на работу с прямым и обратным вращением двигателя. Пример настройки вращения от 25 Гц в одном направлении до 40 Гц в другом. При положении ручки потенциометра 0% двигатель вращается в обратном направлении на частоте 25 Гц. Пропорционально вращению ручки потенциометра двигатель замедляется, останавливается и начинает вращаться в прямом направлении. При положении ручки 100% достигается частота 40 Гц с вращением в прямом направлении (см. рис. 6).
 Рисунок 6 — График задания частоты
Рисунок 6 — График задания частоты
- Р310=25 (частота при минимальном сигнале);
- Р311=1 (направление вращения при минимальном сигнале = обратное);
- Р312=40 (частота при максимальном сигнале);
- Р314=1 (при аналоговом сигнале реверс разрешен).
Задание частоты встроенными кнопками «Вверх/Вниз» (предустановленная выходная частота)
Фиксированная частота используется в качестве задания выходной частоты, когда параметр P101=0. Во время работы ПЧ выходную частоту можно изменять кнопками «Вверх/Вниз» (расположенными на встроенной панели управления). После отключения питания значение частоты вернётся на значение в параметре P100, если P812=1. После отключения питания значение частоты заданной кнопками «Вверх/Вниз» сохраняется, если P812=0 (задано по умолчанию).
Задание частоты командами «Больше/Меньше»
Выходная частота задаётся сигналами «Вверх/Вниз», подключенными к программируемым дискретным входам (см. рис 7).
 Рисунок 7 — Задание частоты через дискретные входы (команды «Больше/Меньше»)
Рисунок 7 — Задание частоты через дискретные входы (команды «Больше/Меньше»)
Для конфигурации входов, необходимо изменить параметры:
- Р101=4 — источник задания выходной частоты = внешние кнопки «Вверх/Вниз»;
- P317=15 — вход S1 запрограммирован на сигнал «Вверх», то есть увеличение заданной частоты;
- P318=16 — вход S2 запрограммирован на сигнал «Вниз», то есть уменьшение заданной частоты.
При замыкании контакта «Вверх» происходит увеличение заданной частоты, при замыкании контакта «Вниз» происходит уменьшение заданной частоты. Для сохранения заданной частоты после отключения питания необходимо установить соответствующий параметр P812=0 (установлен по умолчанию) (см. рис. 8).
 Рисунок 8 — Задание частоты командами «Больше/Меньше»
Рисунок 8 — Задание частоты командами «Больше/Меньше»
Выносной пульт EMD-Mini RCP имеет абсолютно те же функции и возможности, что и панель управления на самом частотнике.
 Пульт ELHART EMD-Mini RCP
Пульт ELHART EMD-Mini RCP
При подключении пульта EMD-Mini RCP показания на встроенной панели и внешнем пульте дублируются (отображаются синхронно). При этом кнопки и потенциометр на встроенной панели не активны. Управление и настройки происходят только с внешнего пульта.
Пульт ELHART EMD-Mini P318=16 — вход S2 запрограммирован на сигнал «Вниз», то есть уменьшение заданной частоты
Сводная таблица — сравнения способов управления преобразователем частоты
| Способ управления | Преимущества | Недостатки |
|---|---|---|
| Со встроенной панели |
|
|
| С пульта EMD-Mini RCP |
|
|
| С внешних кнопок/переключателей, потенциометра |
|
|
5. Устранение типовых неполадок в работе частотного преобразователя
Если причины возникновения неполадки не известны, то рекомендуется произвести сброс параметров на заводские значения Р117=8 и провести настройку преобразователя частоты еще раз.
Устранение типовых неполадок в работе
| Неполадка | Причина и способ устранения |
|---|---|
| Параметр не может быть изменен |
|
| Электродвигатель не начинает вращение при подаче команды «ПУСК» |
|
| Двигатель не работает в режиме вращения в обратном направлении |
|
| Двигатель работает в режиме вращения в обратном направлении |
|
Инженер ООО «КИП-Сервис»
Рыбчинский М.Ю.
Источник
Часто задаваемые вопросы
Не могу найти свой город
При оформлении заказа на сайте, Вы можете указать ближайший крупный город, а при подтверждении заказа менеджером сообщите Ваш точный адрес.
Как узнать стоимость доставки в мой населенный пункт?
Зайдите на карточку интересующего товара. В поле «Ваш населенный пункт» выберите нужный город. Если вместо стоимости доставки Вы видите слово «Уточняйте», тогда при подтверждении заказа менеджер сообщит точную стоимость доставки до вашего города.
Может ли измениться стоимость доставки?
Стоимость доставки является фиксированной. Только при особых пожеланиях заказчика стоимость доставки может измениться (например: при заказе обрешетки груза).
Существует несколько способов управления частотным преобразователем. В процессе работы ПЧ происходит оперативный контроль следующих функций:
Пуск – Останов
(Старт – Стоп). Управление началом вращения и торможением подключенного двигателя.
Установка скорости.
Настройка рабочей скорости привода.
Аварийный останов.
Аварийное снятие силового питания, сигнал разрешения работы.
Эти изменения в работе ПЧ производятся путем подачи сигналов с внешних устройств либо с панели управления. Остальными параметрами можно управлять исключительно с панели управления, причем некоторые из них активны только при выключенном двигателе.
Способы управления могут быть следующими
:
- управление с помощью клавиатуры (панели управления) частотного преобразователя
- управление с помощью пульта ДУ
- аналоговый вход (изменение текущей скорости вращения двигателя)
- дискретные входы (изменение различных состояний и параметров преобразователя)
- последовательный интерфейс RS-485 либо его аналог
Рассмотрим управление преобразователем на примере ПЧ Prostar PR6000.
Управление через аналоговый вход
В преобразователе частоты PR6000 имеется два аналоговых входа – AI1 и AI2. Это выгодно отличает его от других моделей с одним аналоговым входом.

Вход AI1 может использоваться для управления по напряжению с входным сопротивлением 47 кОм. Вход AI2 имеет выбор, который производится переключателем: токовый вход с входным сопротивлением 500 Ом, или вход по напряжению.
Неправильные сети. Несогласованная сеть.
Сравним формулировку данных от неправильной сети разработанной системы. Она была измерена в точках А и В. Здесь на краях пары резисторов для согласования. Сигнал идет от источника, сталкивается с цепью на кабеле. Это ведет к разрушению импедансов, отражению. В открытой цепи энергия идет назад, вызывает искажение сигнала.

Рис. 8. Сеть несогласована. Форма сигнала отличается от правильной.
Расположение терминатора неправильное.
Резистор согласованный есть, но размещен отлично от другого конца кабеля. Сигнал сталкивается с импедансом и его рассогласованием, соединяется на резисторе. Сопротивление было согласовано с кабельным сопротивлением. Дополнительный кабель дает рассогласование и отражает экран. Другое рассогласование – это другой конец кабеля.

Рис. 9. Сеть с резистором, который размещен неправильно, его сигнал.
Управление через дискретные входы
У преобразователя PR6000 имеется 8 дискретных (цифровых) входов: FWD (вперед/стоп), REW (назад/стоп) и 6 входов DI1…DI6.
Входы FWD и REW могут работать в двух- и трехпроводном режиме, при этом третий провод программируется на одном из входов DI1…DI6. Выбор режима управления скоростью устанавливается в параметре Р077.
Дискретные входы DI1…DI6 являются многофункциональными, они программируются на разные функции, которые запускаются при активации соответствующего входа.
Набор возможных функций: выбор многоскоростного режима, выбор разгона/замедления, включение вращения в режиме JOG вперед/назад, управление остановом, увеличение/уменьшение частоты, вход сигнализации неисправности (аварии), пауза при пуске, трехпроводное управление пуском/стопом, торможение постоянным током, сброс ошибки/сообщения, работа по качающейся частоте, включение/сброс/вход счетчика. Всего можно выбрать до 20 различных параметров, которые устанавливаются в параметрах Р071…Р076 для каждого входа. Активация дискретных входов происходит путем замыкания нужного входа на клемму СОМ. Причем, это может производиться разными способами — выходом контроллера, контактами реле, датчика или ручной кнопки. Дискретные и аналоговые входы показаны ниже.

Управление через последовательный интерфейс
При работе через интерфейс RS-485 преобразователь частоты управляется контроллером либо персональным компьютером через специальный адаптер-преобразователь RS-485/RS-232.

Через этот интерфейс преобразователь может не только принимать команды на изменения параметров и состояния, но и выдавать информацию о своем текущем состоянии на другие устройства. Также по интерфейсу RS-485 может поддерживаться связь с другими преобразователями.
Далее поговорим о способах оперативного управления режимами ПЧ.
Применение частотного преобразователя
Применение частотных преобразователей позволило успешно реализовать эффективные системы регулирования скорости нижеприведенных объектов:
- насосы горячей/холодной воды в системах тепло- и водоснабжения;
- вспомогательные агрегаты котельных, ТЭС, ТЭЦ и котлоагрегатов;
- дробилки, мельницы, экструдеры и мешалки;
- различные песковые и пульповые насосы обогатительных фабрик;
- лифтовые установки;
- центрифуги разных типов;
- производственные линии картона, пленки и прочих ленточных материалов;
- крановое и эскалаторное оборудование;
- механизмы силовых манипуляторов;
- приводы буровых станков, специализированного оборудования и т.д.
В начале статьи уже было рассмотрено, для чего нужен частотный преобразователь, а на данном этапе освещения вопроса остается подчеркнуть, что этот тип оборудования позволяет получить существенный экономический эффект:
- экономия до 50% электроэнергии в агрегатах путем поддержания двигателя в режиме оптимального КПД;
- увеличение объема и оптимизация качества выпускаемой продукции;
- повышение уровня производительности производственного оборудования;
- снижение степени износа механических звеньев;
- продление срока эксплуатации технологического оборудования, коммутационной аппаратуры.
В конечном итоге, назначение преобразователя частоты – это обеспечение максимально эффективной и продуктивной работы оборудования со всеми вытекающими положительными аспектами.
Старт/Стоп двигателя
Запуск и останов двигателя может производиться следующими способами.
- С панели управления преобразователя частоты. Для этого используются кнопки RUN, STOP/RESET. Если нужен кратковременный запуск, используется кнопка JOG.
- Подачей сигнала на дискретные входы FWD, REW при двухпроводном управлении. Для трехпроводного управления нужно задействовать один из дискретных входов DI1…DI6 и запрограммировать его соответствующим образом. Режим выбирается параметром Р077. Любой из этих входов можно также использовать для импульсного запуска (команда JOG). При двухпроводном управлении для работы двигателя необходим постоянный сигнал на соответствующих входах. При трехпроводном достаточно кратковременного сигнала.
- Через последовательный интерфейс командами с контроллера. Выбор источника команды Старт/Стоп в ПЧ Prostar PR6000 производится в параметре Р006.
Двухпроводное управление пуском/остановом

Трехпроводное управление пуском/остановом

Удлиненные ответвители.
Кабель согласован, нагружен передатчик на витую пару одну. Проводной сегмент в точке подключения приемника слишком длинный. Большие ответвители оказывают большое рассогласование импеданса и отражают сигнал. Ответвители делают наименьшей длины.

Рис. 11. Сеть с трехметровым ответвителем и сигнал в итоге в сравнении с сигналом с маленьким ответвителем.
Управление частотой
ПЧ может управлять скоростью несколькими способами в зависимости от конкретного оборудования.
- Управление скоростью при помощи переменного резистора, установленного на клавиатуре (панели управления) ПЧ.
- Дискретное изменение при помощи клавиш панели управления Вверх/Вниз.
- Дискретное изменение при помощи контактов (любых двух), подключенных ко входам DI1…DI6. При активации соответствующего дискретного входа происходит уменьшение либо увеличение скорости в заданных пределах с заданным шагом. Примечание. В вариантах 2 и 3 при включении питания двигатель запускается на частоту, установленную в параметре Р005. В процессе работы частоту можно оперативно изменять. Если измененное значение частоты необходимо запомнить, используется параметр Р155.
- Задание скорости при помощи аналоговых сигналов напряжения или тока, поступающих на входы AI1, AI2. Аналоговые сигналы могут комбинироваться в разных вариантах.
- Задание в соответствии с частотой импульсов на входе DI6.
- Через интерфейс RS-485 от контроллера. Выбор канала управления частотой осуществляется параметром Р004. Верхняя и нижняя рабочие частоты устанавливаются в параметрах Р009 и Р010. Скорость работы двигателя в импульсном (толчковом) режиме JOG задается параметром Р052.
Способы контроля
Многие люди, работающие в сфере автоматизации, но не сталкивающиеся вплотную с процессами разработки и внедрения систем электроприводов полагают, что управление электродвигателем состоит из последовательности команд, вводимых с помощью интерфейса от пульта управления или ПК. Да, с точки зрения общей иерархии управления автоматизированной системой это правильно, однако есть еще способы управления самим электродвигателем. Именно эти способы и будут оказывать максимальное влияние на производительность всей системы.
Для асинхронных электродвигателей, подключенных к преобразователю частоты, существует четыре основных способа управления:
- U/f – вольт на герц;
- U/f с энкодером;
- Векторное управление с разомкнутым контуром;
- Векторное управление с замкнутым контуром;
Все четыре метода используют широтно-импульсную модуляцию ШИМ, которая изменяет ширину фиксированного сигнала путем изменения длительности импульсов для создания аналогового сигнала.
Широтно-импульсная модуляция применяется к преобразователю частоты путем использования фиксированного напряжения шины постоянного тока. Транзисторы с изолированным затвором (IGBT) путем быстрого открытия и закрытия (правильней сказать коммутации) генерируют выходные импульсы. Варьируя ширину этих импульсов на выходе получают «синусоиду» нужной частоты. Даже если форма выходного напряжения транзисторов импульсная, то ток все равно получается в виде синусоиды, так как электродвигатель имеет индуктивность, которая влияет на форму тока. Все методы управления основываются на ШИМ модуляции. Разница между методами управления заключается лишь в методе вычисления подаваемого напряжения на электродвигатель.
![]()
В данном случае несущая частота (показана красным) представляет собой максимальную частоту коммутации транзисторов. Несущая частота для инверторов, как правило, лежит в пределах 2 кГц – 15 кГц. Опорная частота (показана синим) представляет собой сигнал задания выходной частоты. Для инверторов применимых в обычных системах электроприводов, как правило, лежит в пределах 0 Гц – 60 Гц. При накладывании сигналов двух частот друг на друга, будет выдаваться сигнал открывания транзистора (обозначен черным цветом), который подводит силовое напряжение к электродвигателю.
Аварийный останов ПЧ
Кроме штатного останова функцией Стоп с заданным замедлением используются два способа экстренного останова двигателя и отключения ПЧ.
- Аварийный останов прерыванием питания. Для этого производители рекомендуют перед силовым питанием ПЧ устанавливать трехфазный линейный контактор, питание катушки которого зависит от состояния аварийной цепи всего оборудования. При нажатии на кнопку «Аварийный останов» или другом экстренном случае питание контактора отключается, и напряжение с ПЧ снимается. Таким образом двигатель гарантированно остановится.
- Используется функция дискретного входа DI1…DI6 «Сигнализация неисправности внешнего устройства». Если запрограммировать нужный вход на эту функцию, в случае подачи на него аварийного сигнала преобразователь остановится.
Другие полезные материалы:
Тонкости настройки преобразователя частоты FAQ по электродвигателям Настройка преобразователя частоты для работы на несколько двигателей Назначение и виды энкодеров
Кабели составные.
Проблема состоит в драйверах, которые разработаны чтобы управлять одной витой парой. Не любой передатчик может управлять 4-мя витыми параллельными парами. Уровни логические минимальные не гарантируются. Вместе с большой нагрузкой есть различие импедансов в месте, где соединены кабели. Различие импедансов значит отражение и искажение сигнала.

Рис. 10. Некорректная сеть с несколькими парами.
( 1 оценка, среднее 4 из 5 )
Преобразователь частоты переменного тока уже много лет применяются при строительстве электромеханических приборов и агрегатов. Они позволяют модулировать частоту для того, чтобы регулировать скорость вращения вола электрического двигателя.
Частотники позволили подключать трёхфазный электрический двигатель к однофазной сети питания, при этом, не теряя мощности. При старинном типе подключения, через емкий конденсатор, большая часть мощности двигателя терялась, КПД существенно снижалось, обмотки электрического двигателя сильно перегревались.

Всех этих проблем удалось избежать, применением частотного преобразователя. При этом очень важно соблюдать правильное подключение частотного преобразователя к электрическому двигателю.
Некоторые особенности подключения любого частотника в связку с электрическим двигателем.
Подготовка

Установка преобразователя частоты для электромотора – процесс сложный и ответственный. Он пройдет тем проще и быстрее, чем правильнее сделан выбор частотного преобразователя. Поиск оптимального варианта устройства отталкивается от условий будущей эксплуатации. Опорные моменты следующие.
- Место установки частотного преобразователя. От него зависит несколько важных характеристик частотника. Класс влаго- и пылезащищенности корпуса. Современные преобразователи частоты выполняются в нескольких классах – IP 20, 54, 65. Чем выше защита (первая цифра отвечает за пылезащиту, вторая – за влагонепроницаемость), тем шире возможности по выбору места установки. Модели с IP 20 монтируют только в электротехнические щиты (с автоматикой или ручной системой управления приводом), установленные в помещениях с низким уровнем влажности. Установка в корпусах IP 54 или IP 65 возможна рядом с обслуживаемым мотором.
- Основание преобразователя частоты. Если устройство будет в зоне, удаленной от вибраций и электромагнитных полей, ему достаточно ровной твердой площадки. В противном случае монтаж может осуществляться на опорах, гасящих вибрации, или в шкафах с экранами.
- Климатическое исполнение. Если преобразователь частоты устанавливается на открытой или частично открытой платформе, климатическое исполнение должно соответствовать максимальной и минимальной температуре окружения в теплый и холодный сезон, соответственно. При закрытом монтаже температурный режим, которому должен соответствовать прибор, задает помещение.
При установке частотника в шкаф важно соблюсти отступы корпуса от стенок шкафа или других приборов, расположенных в сборке. Размеры отступов определяются индивидуально по мощности монтируемых устройств. Для отвода тепла в закрытом пространстве шкафа в него устанавливаются вентиляторы достаточной мощности (зависит от количества преобразователей частоты и других механизмов).
Настройка сетевых параметров ПЧ EMD-MINI
В преобразователе частоты необходимо установить параметры согласно таблице 1.
Таблица 1 — Настройка параметров EMD-MINI
| Параметр | Значение | Описание |
| P101 | 5 | Источник задания выходной частоты — интерфейс RS-485 |
| P102 | 2 | Источник команд управления — интерфейс RS-485 |
| P700 | 1 | Скорость передачи данных — 9600 бод |
| P701 | 3 | Формат данных — 8,N,1, протокол Modbus RTU |
| P702 | 1 | Адрес преобразователя частоты — 1 |
Монтаж частотника

Привод устанавливается на твердую ровную площадку из негорючего материала в месте, недоступным для прямых лучей солнца. Сложность работ по установке прибора зависит от него самого (чем выше мощность и больше функций, тем сложнее схема подключения частотного преобразователя).
Для установки, кроме самого преобразователя частоты, потребуются соединительные провода, крепежи, инструмент для подготовки технических отверстий, если они необходимы, обжимка, автоматические выключатели. Параметры выключателей должны соответствовать характеристикам выбранного частотника. Порядок действий:
- изучить инструкцию частотного преобразователя;
- сформировать комплект дополнительных изделий, руководствуясь рекомендациями производителя;
- выполнить работы по настройке, перечисленные в инструкции (строго соблюдая последовательность, проверяя контакты и качество обжимки проводов, без спешки);
- повторно проверить надежность креплений, отсутствие неизолированных проводов и т. д. (базовые пункты правил безопасности при проведении электротехнических работ).
Важный момент: сразу после подключения частотный преобразователь электродвигателя запускать нельзя. В любой инструкции есть это указание, но многие его нарушают. По статистике, такое действие – самая распространенная причина негарантийного ремонта нового преобразователя частоты.
Вторая распространенная ошибка – использование автоматики, не рассчитанной на уровень потребления электродвигателя, к которому подключается частотник. Это приводит к подвижности биметаллической пластины, хаотичным разъединениям цепи и повреждению механизма.
Подключение, настройка

Схема подключения частотника предполагает установку перед ним автоматического выключателя. В идеале последний должен работать с током, равным номинальному потреблению электромотора. Если в каталоге нужного выключателя преобразователя частоты не нашлось, надо брать аналог, приближенный к номинальному току электродвигателя.
Количество фаз, на которое рассчитана автоматика, выбирается по частотнику:
- Для трехфазного устройства берется 3-фазный выключатель с общим рычагом. Последний обеспечит обесточивание сети при угрозе (факте) короткого замыкания в одной из фаз. Ток срабатывания равен току 1 фазы электродвигателя.
- Для однофазного частотного преобразователя нужен одинарный автомат. Ток срабатывания равен току 1 фазы, умноженному на 3. Подключение – напрямую.
При настройке нужно соединить в электрическом двигателе обмотки (схема – «звезда» или «треугольник» в зависимости от характера напряжения). Затем фазные провода привода соединяются с контактами электродвигателя по схеме подключения частотника.
5.1. Конфигурация порта COM2
В первую очередь необходимо произвести настройку порта COM2 контроллера. Пример программы для настройки порта представлен на рисунке 2.

М1002 включается один раз при включении контроллера.
D1120 — конфигурация порта COM2. В преобразователе частоты EMD-MINI были установлены следующие настройки связи: скорость 9600 бод, 8 бит данных, контроль четности отсутствует, 1 стоповый бит. Такие же настройки необходимо установить для порта COM2 контроллера. Значения битов для регистра D1120 представлены в таблице 3.
Таблица 3 — Значения битов регистра D1120
| Номер бита | Описание | Значение |
| 0 | Длина данных | 0 — 7 бит данных 1 — 8 бит данных |
| 1-2 | Биты четности | 00 — нет 01 — нечетный 11 — четный |
| 3 | Стоп-биты | 0 — 1 бит 1 — 2 бит |
| 4-7 | Скорость передачи данных | 0000 — 110 0010 — 150 0011 — 300 0100 — 600 0101 — 1200 0110 — 2400 0111 — 4800 1000 — 9600 1001 — 19200 1010 — 38400 1011 — 57600 1100 — 11520 1101 — 500000 1110 — 31250 1111 — 921000 |
| 8 | Выбор стартового бита | 0 — нет; 1 — D1124 |
| 9 | Выбор 1-го конечного бита | 0 — нет; 1 — D1125 |
| 10 | Выбор 2-го конечного бита | 0 — нет; 1 — D1126 |
| 11-15 | Не используются |
В таблице 4 показано, как формируется значение для регистра D1120 с использованием данных из таблицы 3.
Таблица 4 — Значение для регистра D1120
| Биты 15 — 8 | Скорость 9600 | 1 стоп-бит | Биты четности-нет | 8 бит данных |
| В данном примере не используются | 1000 | 0 | 00 | 1 |
В результате в регистр D1120 необходимо записать число 10000001b, предварительно переведя его в шестнадцатеричный формат — 81h. Также можно воспользоваться встроенным в WPLSoft калькулятором в разделе Help>Auxiliary Editing>Protocol⇔Setting Code (рисунок 3).

В полях слева необходимо выбрать конфигурацию протокола и нажать на стрелку вправо. В поле справа будет число в шестнадцатеричном формате, которое нужно записать в D1120.
М1143 — реле выбора режима ASCII/RTU. Если оно включено, то используется режим RTU, если выключено — режим ASCII.
D1129 — настройка времени ожидания ответа в миллисекундах. Если время ожидания ответа будет превышено, включится специальное реле М1129. В данном примере время ожидания составляет 300 миллисекунд.
М1120 — сохранение параметров связи для порта COM2.
Пульт управления

Частотный регулятор управляется с пульта (ПУ), который идет в комплекте с прибором. Для подключения ПУ частотника необходимо монтировать в удобном месте по схеме в инструкции пользователя. После монтажа рукоять ПУ ставится в нулевое положение и дается команда RUN. Следующий шаг – плавный поворот рукояти на минимальный градус:
- Если после подключения частотного преобразователя к двигателю, последний вращается в правильную сторону, можно регулировать скорость. Здесь стоит разобраться, как этот показатель отображается на ПУ частотника. Есть 2 варианта – в оборотах/минуту или герцах. В первом случае показывается скорость вращательного движения электрического двигателя, во втором – питающее напряжение.
- Если двигатель запустился в обратную сторону, включаем реверс на частотнике.
5.3. Чтение регистров и преобразование данных
Первыми по порядку будут исполняться инструкции MODRD — чтение регистров. При значении счетчика С0=0 выполнится первая инструкция MODRD. В этой инструкции необходимо указать следующие параметры:
| MODRD | Адрес устройства | Адрес регистра | Длина данных |
Адрес устройства – 1 (значение К1); Адрес регистра – 2 (значение Н2), текущая выходная частота; Длина данных – 1 (значение К1), количество считываемых регистров.
Далее находятся еще две инструкции чтения – регистра состояния ПЧ (H1C) и регистра состояния дискретных входов и дискретного выхода (H16).
При работе инструкции MODRD считанные данные сохраняются в регистры D1070-D1076, как показано в таблице 5.
Таблица 5 — Расположение принятых данных
| Регистр | Данные |
| D1070 младший байт | Адрес устройства |
| D1071 младший байт | Код функции чтения |
| D1072 младший байт | Количество данных (байт) |
| D1073 младший байт | Содержимое регистра |
| D1074 младший байт | Содержимое регистра |
| D1075 младший байт | CRC |
| D1076 младший байт | CRC |
Как видно из таблицы, данные записываются в младшие байты регистров D1070-D1076 и для дальнейшего использования данные необходимо преобразовать и поместить в один регистр. Пример реализации преобразования приведен на рисунке 6.

При срабатывании специального реле М1127 (завершение приема данных) происходит преобразование с помощью инструкции DTM. Младшие байты из регистров D1073 и D1074 объединяются и значение пересылается в регистр D3. Те же преобразования будут сделаны и для следующих двух инструкций чтения, после чего преобразованные данные будут помещены в регистры D4 и D5 соответственно.
При срабатывании специального реле М1127 или флагов ошибок приема или передачи (М1129, М1140 и М1141) происходит увеличение значения счетчика C0 и переход к следующей инструкции чтения или записи.
Первый запуск

Пусконаладочные работы и дополнительные настройки проводятся после проверки правильности установки и подключения (сборки) привода, контактов, изоляции проводов и т. д. Перед пробным пуском производятся следующие манипуляции:
- запуск осуществляется без каких-либо команд на пульте управления;
- перед нажатием RUN надо убедиться, что кулеры, установленные в шкафу с частотным преобразователем двигателя (+ монтированные в нем вентиляторы), запустились, а на дисплее загорелись индикаторы (устройство должно показать, что находится в выключенном состоянии/OFF);
- для восстановления настроек завода (предписано инструкцией) необходимо ввести соответствующую команду и произвести перезапуск (RESET), если нужно (указано производителем), следует перезапустить всю систему;
- если частотник не определил характеристики электрического двигателя автоматически, их надо задать (по двигателю, фильтрам вспомогательным элементам привода, скорости вращения, параметрам регулирования).
Пробный запуск привода проводится вручную. После настройки и включения проверяется направление движения вала электродвигателя, работа в интервале заданных скоростей. Если какие-то настройки заданы неверно, их правят.
Окончательная настройка осуществляется специалистом отдела автоматизации с панели управления или на самом частотнике. После этого можно запускать тестирование и проводить последние корректировки (собирать данные по работе).
На каждом этапе подключения частотного преобразователя важно строго придерживаться инструкции к нему. Все работы по установке привода проводит квалифицированный сотрудник, который знает, насколько опасно и вредно для бюджета компании-покупателя устройства (читать: категорически нельзя) вносить правки в схему или программное обеспечение электротехники.
5.4. Запись регистров
Пример записи регистров приведен на рисунке 7. Если значение регистров D0 или D1 изменяются, то срабатывают реле М20 или М21 и происходит исполнение соответствующей инструкции MODWR.

Порядок записи параметров инструкции MODWR:
| MODWR | Адрес устройства | Адрес регистра | Данные для записи |
Адрес преобразователя частоты — 1 (значение К1); Адрес регистра — 2001 (значение Н2001), регистр, в который будет производиться запись; Источник данных для записи — регистр D0.
Данные из регистра D0 записываются в регистр H2001, из D1 — в регистр Н2000. После успешной записи данные из регистра D0 копируются в регистр D10, а из регистра D1 — в регистр D11, реле M20 и М21 сбрасываются (рисунок 8).

( 2 оценки, среднее 4.5 из 5 )
Содержание
- Применение ПЧ ELHART EMD-MINI в системах поддержания давления
- 1. Введение
- 2. Классическое регулирование
- 3. Регулирование оборотов
- 4. Реализация системы управления на ПЧ
- 4.1 Способ включения
- 4.2 Тип обратной связи
- 4.3 Способ задания уставки
- 4.4 ПИД-регулятор
- 4.5 Спящий режим
- 4.6 Тип используемого датчика
- 4.7 Отслеживание обрыва датчика
- 4.8 Масштабирование сигнала ОС
- 4.9 Способ вывода измерений
- 4.10 Аварийная сигнализация
- 5. Применение дополнительного оборудования
- 5.1 Датчик давления
- 5.2 Монтаж датчика давления
- 5.3 Диагностика работы насоса
- 5.4 Защита от сухого хода насоса
- 5.5 Применение обратного клапана
- 5.6 Монтаж запорной арматуры
- 6. Вывод
Применение ПЧ ELHART EMD-MINI в системах поддержания давления
1. Введение
Задачи, требующие перемещения газов и жидкостей под напором, возникают и в промышленности, и в повседневной жизни. В промышленности используются компрессорные установки, системы смазки и охлаждения, системы транспортирования продуктов, различные гидравлические системы, приводы. В бытовой сфере применяются системы водоснабжения, вентиляции, отопления, кондиционирования, канализационные насосные станции. Используемые для этого насосы классифицируются по принципу работы и по конструкции, но большинство из них объединяет привод — асинхронный электродвигатель.
Данный двигатель получил широкое распространение благодаря своей простоте и надежности. Он не требует регулярного обслуживания, у него отсутствует скользящий контакт и возможен прямой пуск от сети. Ещё одно значительное преимущество — простота регулирования скорости вращения.
В данной статье рассмотрено частотное регулирование в сравнении с классическим дросселированием, описаны реализация и способ настройки на примере преобразователя частоты.
2. Классическое регулирование
Работу любого насоса характеризует зависимость напор-подача (см. рисунок 1). Эта характеристика показывает, какой напор сможет обеспечить насос при текущей подаче.
 Рисунок 1 — Рабочая характеристика насоса
Рисунок 1 — Рабочая характеристика насоса
Определить, сможет ли насос обеспечить требуемую производительность, можно по характеристике насоса и по требуемым в системе напору и подаче. На рисунке 2 представлена характеристика насоса с отмеченными точками: требуемый напор (Hтр) и требуемая подача (Qтр). Согласно графику данный насос сможет обеспечить требуемую производительность с определенным запасом (зеленая зона). Но если расход превысит значение Q1, насос не сможет обеспечивать требуемый напор (красная зона).
 Рисунок 2 — Определение рабочей точки на характеристике насоса
Рисунок 2 — Определение рабочей точки на характеристике насоса
Если насос работает с постоянной подачей, требуется лишь выбрать модель соответствующей производительности. Но тогда как обеспечивать напор при переменной подаче? Ведь при изменении расхода жидкости будет меняться и создаваемый напор. Чем больше в системе будет расход, тем меньшее давление насос сможет обеспечить. И наоборот, при снижении расхода давление будет повышаться. Даже в представленном примере насос нагнетает напор больше (H1), чем требуется (Hтр).
Типовое решение данной проблемы — дросселирование. В напорный трубопровод добавляется сопротивление, снижающее давление при низком разборе. Дросселирование позволяет регулировать только в одну сторону — на уменьшение подачи. Поэтому для поддержания требуемого напора необходимо применить насос, производительность которого при Qтр сможет обеспечить Hтр (см. рисунок 3).
 Рисунок 3 — Несоответствие характеристик насоса требованиям
Рисунок 3 — Несоответствие характеристик насоса требованиям
При снижении расхода (давление при этом растет) необходимо будет все больше закрывать дроссель. Работа в таком режиме неэффективна — целесообразно остановить насос, а при увеличении расхода запустить повторно. На рисунке 4 изображено, как при достижении требуемого напора (Hтр) происходит остановка насоса, а при падении ниже заданного порога (Hмин) — насос запускается вновь.
 Рисунок 4 — Двухпозиционное регулирование
Рисунок 4 — Двухпозиционное регулирование
Такая система обрела популярность благодаря своей простоте, но имеет и ряд минусов:
1. В момент прямого пуска двигатель потребляет ток в 6-7 раз превышающий номинальный, что приводит к дополнительной нагрузке на сеть. При нехватке мощности питающей сети двигатель может не запуститься.
2. «Пусковые токи» – это кратковременное явление, но оно оказывает негативное влияние на обмотки двигателя (возможен перегрев и старение изоляции). Для каждого двигателя изготовитель указывает допустимое количество включений в час — это накладывает ограничение на частоту включения/отключения насосов.
3. Двухпозиционное регулирование зачастую является причиной колебательных процессов (см. рисунок 4). Запуск и остановка двигателя происходят скачкообразно — внезапное повышение давления приводит к возникновению гидроударов, повреждениям труб и запорной арматуры.
4. Дросселирование при переменной подаче является неэффективным с точки зрения энергозатрат, так как насос постоянно работает с номинальной скоростью.
Часть проблем решается дополнительным оборудованием:
- Для запуска двигателя применяют устройства плавного пуска или переключатели «звезда-треугольник»
- Колебания давления компенсируются за счет аккумулирующих резервуаров, систем рециркуляции.
- Устройства коммутации защищаются дополнительными реле напряжения и тепловыми реле.
Качество работы такой системы растет, но при этом растет и количество элементов в системе управления. Это влечет за собой снижение общей надежности и усложнение обслуживания.
3. Регулирование оборотов
Избавиться от вышеописанных проблем возможно при регулировании оборотов насоса. Существует зависимость расхода (Q) и напора (Н) от скорости вращения (n). Для центробежных насосов её описывает закон подобия:
Согласно ему, изменяя частоту вращения, возможно изменить характеристику насоса.
Из (1) и (2) следует:
Таким образом, с помощью полученной функции (3) можно построить подобные параболы и для других режимов работы, где n ≠ nном. На рисунке 5 изображены различные характеристики одного насоса, но на разных скоростях. Видно, что изменяя скорость вращения, можно обеспечить требуемое соотношение
Данные кривые построены с учетом постоянного КПД. В действительности с увеличением скорости вращения возрастает скорость потока и гидравлические потери в трубопроводе, а при снижении скорости увеличиваются механические потери в двигателе. Поэтому для каждого насоса имеется оптимальная скорость, при которой достигается максимальный КПД.
 Рисунок 5 — Характеристики насоса Grundfoss CM3 при изменении частоты вращения
Рисунок 5 — Характеристики насоса Grundfoss CM3 при изменении частоты вращения
Стоит учесть, что у центробежных насосов значение напора находится в квадратичной зависимости от скорости вращения. Регулировать обороты достаточно в пределах 30-40 % от номинальной скорости. К тому же за счет регулирования скорости можно осуществить плавный разгон двигателя и избежать возникновения гидроударов, колебаний в системе и высоких пусковых токов.
4. Реализация системы управления на ПЧ
В системах водоснабжения расход является переменной величиной, а давление должно быть неизменным. Если в такую систему добавить датчик давления (обратной связи), можно реализовать автоматический регулятор. В качестве таких регуляторов отлично зарекомендовали себя преобразователи частоты ELHART EMD-MINI и EMD-PUMP. Они имеют встроенный ПИД-регулятор и универсальный аналоговый вход. В данном разделе на примере преобразователя EMD-MINI будет рассмотрена типовая настройка параметров управления.
По умолчанию аналоговый вход ПЧ настроен на сигнал 0. 10 В (к примеру, такой сигнал у датчиков mic+, преобразователей T201DCH, датчиков влажности). Чтобы запустить режим регулирования, достаточно подключить подобный датчик, задать параметр P600=1 и нажать кнопку «RUN». В зависимости от сигнала обратной связи преобразователь решит: оставаться на текущей частоте, понижать её или повышать. Конечно, для частного случая может потребоваться дополнительная настройка. За работу ПИД-регулятора отвечает шестая группа параметров (см. Таблицу 1).
Таблица 1 — Параметры настройки ПИД-регулятора
| Код | Параметр | Описание параметра |
|---|---|---|
| P600 | Включение ПИД-регулятора | 0: Выключен 1: Включен 2: Включение по условию |
| P601 | Тип обратной связи ПИД-регулятора | 0: Отрицательная обратная связь 1: Положительная обратная связь |
| P602 | Источник задания уставки ПИД-регулятора | 0: Фиксированная уставка P604 1: Потенциометр на пульте управления ПЧ |
| P604 | Фиксированная уставка ПИД-регулятора | 0. 100,0 % |
| P605 | Верхнее значение аварийного сигнала обратной связи ПИД-регулятора | 0. 100 % |
| P606 | Нижнее значение аварийного сигнала обратной связи ПИД-регулятора | 0. 100 % |
| P607 | Пропорциональная составляющая. ПИД-регулятора | 0. 500,0 |
| P608 | Время интегрирования ПИД-регулятора | 0. 200,0 сек |
| P609 | Время дифференцирования ПИД-регулятора | 0. 200,0 сек |
| P611 | Частота входа в спящий режим | 0. 120 Гц |
| P612 | Время задержки перехода в спящий режим | 0. 200 сек |
| P613 | Уровень выхода из спящего режима | 0. 100 % |
| P614 | Значение обратной связи, отображаемое на дисплее | 0. 9999 |
| P615 | Кол-во разрядов, отображаемых на дисплее | 0. 4 |
| P616 | Кол-во разрядов после точки, отображаемых на дисплее | 0. 4 |
| P621 | Отслеживание обрыва сигнала AVI | 0: Не отслеживается 1: Индикация 2: Остановка с ручным сбросом аварии |
| P622 | Нижний уровень сигнала AVI | 0. 2 В (4 мА соответствуют 1 В) |
| P623 | Время обнаружения обрыва сигнала | 0. 20 сек |
Помимо настроек регулятора пользователю могут понадобиться дополнительные настройки:
Таблица 1 — Параметры настройки преобразователя
| Код | Параметр | Значение |
|---|---|---|
| P000 | Параметр, отображаемый на дисплее после подачи питания | 0. 12 |
| P102 | Источник команд управления | 0: Пульт управления 1: Многофункциональные дискретные входы 2: Интерфейс RS-485 |
| P106 | Минимальная выходная частота | 0. 50 Гц |
| P300 | Минимальное напряжение на входе AVI | 0. 10 В |
| P301 | Максимальное напряжение на входе AVI | 0. 10 В |
| P315-318 | Многофункциональные дискретные входы | 0. 25 |
| P325 | Многофункциональный релейный выход | 0. 28 |
Ниже представлен пример использования ПЧ для управления насосной станцией:
В данном случае используется преобразователь давления PTE5000C-010-М20-С (диапазон измерения 10 бар, выход 4. 20 мА). Команда на запуск насоса подается с внешнего переключателя. Схема подключения представлена на рисунке 6.
В примере указана схема подключения для ПЧ модификации EMD-MINI-015T (v1.0). Символ «T» обозначает тип питающего и выходного напряжения — трехфазное, 380В. Если обмотки используемого двигателя рассчитаны на напряжение 220В, существует модификация «S». Питающее напряжение таких ПЧ — однофазное, 220В (используются только клеммы L1 и L2), а выходное напряжение — трехфазное, 220В.
Для данной схемы подключения необходимо настроить параметры:
- P117 = 8: Сброс на заводские настройки
- P000 = 12: Настройка режима отображения
- P102 = 1: Источник команды «Пуск» — дискретный сигнал
- P106 = 20 Гц: Минимальная выходная частота — 20 Гц
- P300 = 1 В: Минимальный сигнал на входе AVI (1 В соответствует 4 мА)
- P301 = 5 В: Максимальный сигнал на входе AVI (5 В соответствует 20 мА)
- P325 = 3: Дискретный выход срабатывает при аварии
- P600 = 1: Включение режима ПИД-регулятора
- P604 = 50 %: Задание уставки относительно сигнала ОС — 5 бар
- P611 = 22 Гц: Частота входа в спящий режим
- P612 = 60 сек: Время задержки входа в спящий режим
- P613 = 60 %: Уровень выхода из спящего режима
- P614 = 1000: Значение обратной связи, отображаемое на дисплее — 10.00 бар
В результате мы получим регулятор давления, который поддерживает давление на уровне 5 бар. Он имеет возможность ухода в спящий режим при работе на частоте ниже 22 Гц в течение 60 секунд. Обладает аварийной индикацией и функцией автостарта. Приведенный пример показывает общее построение системы с ПЧ. Конечно, пользователь может более гибко настроить работу преобразователя под свои требования.
С помощью представленных параметров можно изменить:
4.1 Способ включения
Запускать ПЧ можно различными способами:
- Если задать P600=1, то ПЧ будет постоянно находиться в режиме ПИД-регулятора, а команду на запуск самого насоса необходимо подавать дополнительным сигналом (см. P102).
- Если задать P600=2, то ПИД-регулятор будет запускаться только при наличии сигнала на дискретном входе (например, P318=19) . С помощью внешнего тумблера можно реализовать «автоматический» и «ручной» режимы. В одном положении давление поддерживает ПЧ, а в другом — оператор, который вручную управляет насосом.
4.2 Тип обратной связи
ПЧ может работать с положительной (P601=1) и отрицательной (P601=0) обратной связью (ОС). Регулятор с положительной ОС применяется в системах, где управляющее воздействие снижает контролируемую величину, например холодильные машины. А отрицательная ОС подходит для систем, где управляющее воздействие увеличивает контролируемую величину, например повысительные насосы.
4.3 Способ задания уставки
Параметр P602 определяет способ задания уставки:
- При P602=0 оператор задает уставку в параметре P604. Во время работы эту уставку можно изменять кнопками «ВВЕРХ»/«ВНИЗ». Также при работе по протоколу Modbus задание уставки осуществляется через параметр P604.
- При P602=1 оператор задает уставку только с помощью потенциометра.
4.4 ПИД-регулятор
В ПЧ реализован ПИД-регулятор.
Параметры P607, P608 и P609 соответственно являются коэффициентами П, И, Д. В случае неудовлетворительной работы пользователь может вручную корректировать коэффициенты.
4.5 Спящий режим
Если при работе выходная частота опускается ниже значения P611 в течение времени, заданного в P612, ПЧ останавливает двигатель. Выход из спящего режима происходит при превышении рассогласования на значение, заданное в параметре P613. Применение спящего режима позволяет повысить энергоэффективность системы. Для обеспечения стабильной работы необходимо установить минимальную выходную частоту — P106.
4.6 Тип используемого датчика
ПЧ поддерживает работу с аналоговыми сигналами 0. 10 В и 4. 20 мА. Для переключения аналогового входа на определенный сигнал нужно установить переключатель на корпусе ПЧ и задать соответствующие параметры:
- Для датчиков 0. 10 В — P300=0, P301=10;
- Для датчиков 4. 20 мА — P300=1, P301=5.
Стоит учитывать, что предпочтительней использовать токовый сигнал, так как он обладает большей помехозащищенностью, чем сигнал 0. 10 В.
4.7 Отслеживание обрыва датчика
ПЧ может отслеживать потерю сигнала обратной связи. «Обрыв датчика» — ситуация, когда значение сигнала ОС меньше P622 в течение времени P623. Реакцию на обрыв определяет параметр P621:
- «0» – обрыв не отслеживается;
- «1» – при обрыве на экран выводится индикация ошибки, ПЧ сохраняет выходную мощность;
- «2» – при обрыве ПЧ останавливает двигатель, требуется сброс ошибки.
4.8 Масштабирование сигнала ОС
При необходимости показания подключенного датчика можно приводить к пользовательской шкале: с помощью P614, P615 и P616 пользователь может задать значение сигнала ОС, которое будет отображаться на дисплее.
- P614 – значение соответствующее максимальному сигналу ОС.
- P615 – количество разрядов, отображаемых на дисплее.
- P616 – количество разрядов, отображаемых после запятой.
К примеру, если сигнал датчика давления меняется в диапазоне 0.00. 8.00 бар, необходимо задать параметры P614=800, P615=3, P616=2. Корректная настройка данных параметров важна. Относительно сигнала ОС задается уставка регулятора. У ПЧ серии EMD-MINI, выпущенных после четвертого квартала 2018 г., уставка задается в пользовательских единицах. А у ПЧ, выпущенных до этого периода, уставка задается в процентах относительно сигнала ОС. Например, если используется датчик давления (0. 8 бар) и необходимо выставить задание на 6 бар, для старых модификаций ПЧ необходимо установить значение 75%, а для новых модификаций — 6 бар (Рисунок 7).
 Рисунок 7 — Задание уставки в различных величинах
Рисунок 7 — Задание уставки в различных величинах
4.9 Способ вывода измерений
У ПЧ имеется настраиваемый параметр P000, который отвечает за дополнительный экран отображения (Рисунок 8).
Для EMD-MINI с ПО v1.0 возможно отображение ОС только в стандартном режиме. Для этого необходимо установить P000=7. В стандартном режиме на экране будут отображены значение ОС и задание одновременно.
Для EMD-MINI с ПО v1.1 доступны два варианта отображения. При P000=12 на экран будет выведен сигнал ОС в стандартном режиме. При P000=10 включается расширенный режим — сигнал ОС и задание выводятся на экран последовательно.
 Рисунок 8 — Настройка дополнительного экрана отображения
Рисунок 8 — Настройка дополнительного экрана отображения
4.10 Аварийная сигнализация
У ПЧ имеется релейный выход, который можно использовать для дополнительного информирования оператора, например с помощью сигнальной лампы. В P606 задается минимальное давление, а в P607 – максимальное, при котором сработает выход (при P325=14 или P325=15 соответственно). Возможна индикация обрыва датчика ОС, для этого нужно задать P325=16. Также релейный выход может срабатывать при возникновении аварийных ситуаций (P325=3).
5. Применение дополнительного оборудования
При создании системы с частотным регулированием существуют некоторые особенности по использованию дополнительного оборудования и настройке системы:
5.1 Датчик давления
Неотъемлемой частью системы регулирования является датчик давления. От него зависит точность работы всей насосной станции. В первую очередь датчик должен соответствовать требованиям:
- по температуре рабочей и окружающей среды;
- по химической совместимости со средой;
- по точности измерения;
- по типу присоединения;
- по перегрузочной способности (для защиты от гидроудара).
Более подробно выбор датчиков давления описан в отдельной статье.
 Рисунок 9 — Датчики давления: ELHART PTE5000C, Klay CER-8000 и Delta DPA
Рисунок 9 — Датчики давления: ELHART PTE5000C, Klay CER-8000 и Delta DPA
5.2 Монтаж датчика давления
Насос может быть установлен как в систему холодного водоснабжения, так и горячего. Для обеспечения стабильной работы необходимо устанавливать датчик через трехходовой кран и сифонную трубку (Рисунок 10).
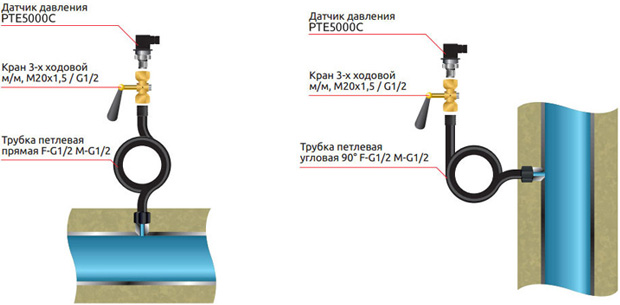 Рисунок 10 — Монтаж датчика давления
Рисунок 10 — Монтаж датчика давления
Кран позволяет производить безопасный монтаж датчика в трубопровод. При установке датчика без крана существует риск повреждения измерительного элемента – вкручивание датчика приводит к сжатию жидкости (давление начинает расти), и измерительный элемент механически разрушается. Петлевая трубка служит для охлаждения измеряемой среды, так как за счет нагрева самого датчика возможно образование конденсата внутри корпуса, который приводит к окислению и корродированию компонентов.
5.3 Диагностика работы насоса
Для проверки работоспособности насоса необходимо контролировать перепад давления или скорость потока в системе (Рисунок 11). Это позволит на раннем этапе диагностировать снижение производительности насоса и не допустить чрезмерного износа оборудования.
Благодаря своей простоте широкое распространение получили реле дифференциального давления, которые сравнивают показания в двух измерительных точках. Релейный выход срабатывает при достижении заданного оператором перепада. Для насосов с малым напором возможно применение реле протока и датчиков скорости. Сигналы с данных устройств могут использоваться как самим ПЧ (для аварийной остановки), так и для верхнего уровня АСУ ТП (например для сбора статистики).
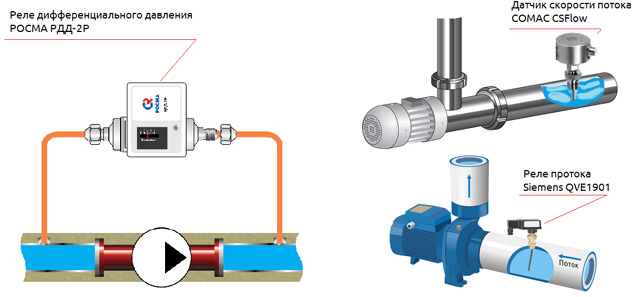 Рисунок 11 — Устройства защиты: COMAC CSFlow, РОСМА РДД-2Р, Siemens QVE1901
Рисунок 11 — Устройства защиты: COMAC CSFlow, РОСМА РДД-2Р, Siemens QVE1901
5.4 Защита от сухого хода насоса
В зависимости от конструкции насоса существует риск его перегрева и выхода из строя. Часто причиной является работа насоса при отсутствии рабочей среды в подающем трубопроводе. Для защиты применяют различные датчики сухого хода (Рисунок 12), которые отслеживают наличие жидкости или давления. Например, в системах, где в подающем трубопроводе присутствует избыточное давление, достаточно использовать реле давления (прессостат). А при малом давлении в подающем трубопроводе оптимально использовать электромагнитные сигнализаторы.
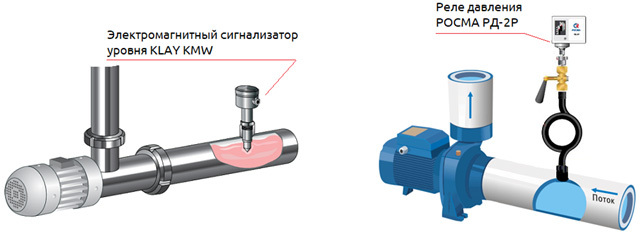 Рисунок 12 — Датчики сухого хода: РОСМА РД-2Р, Klay KMW
Рисунок 12 — Датчики сухого хода: РОСМА РД-2Р, Klay KMW
5.5 Применение обратного клапана
При построении системы с частотным регулированием возможна нестабильная работа спящего режима. ПЧ может с высокой цикличностью производить запуск и остановку насоса или вовсе не уходить в спящий режим. Особенно эта проблема распространена на скважинных насосах. Она связана с тем, что при достижении рабочего давления ПЧ постепенно снижает выходную частоту. Значение напора постепенно падает, и под действием силы тяжести вода может менять направление потока. Для решения данной проблемы необходимо использовать обратный клапан. На рисунке 13 представлен пример установки обратного клапана со стороны напорного трубопровода.
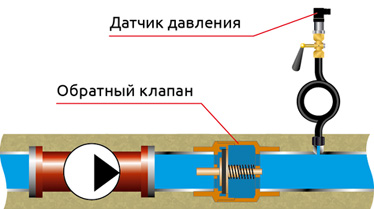 Рисунок 13 — Установка обратного клапана
Рисунок 13 — Установка обратного клапана
Также в некоторых ситуациях подобное поведение возможно у системы с уже установленным обратным клапаном. Это может быть обусловлено неправильно настроенной частотой входа в спящий режим. В таком случае необходимо опытным путем снизить частоту входа в спящий режим (P611) до значения, при котором насос обеспечит оптимальную работу.
5.6 Монтаж запорной арматуры
Необходимо учитывать требования СП 31.13330.2012 (п. 10.8 и 10.9) по оборудованию насосных станций запорной арматурой. Это позволит беспрепятственно производить техническое обслуживание оборудования на насосной станции.
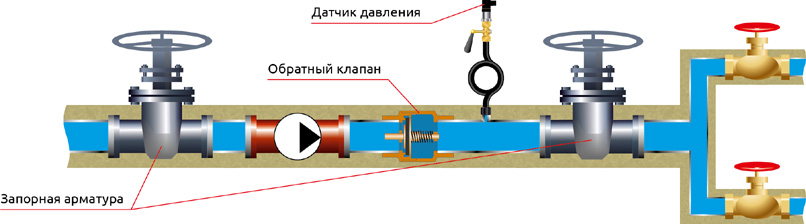 Рисунок 14 — Установка запорной арматуры
Рисунок 14 — Установка запорной арматуры
6. Вывод
Современные преобразователи частоты обладают достаточным функционалом для работы в системах поддержания давления. Они с легкостью заменяют системы дроссельного регулирования, обладая следующими преимуществами:
- снижение пусковых токов;
- снижение колебаний давления в системе;
- повышение энергоэффективности установки;
- повышение общей надежности системы;
- упрощение обслуживания.
Кроме того, благодаря встроенному регулятору и универсальному аналоговому входу, применение ПЧ не ограничено насосным оборудованием. Различные компрессорные и климатические установки, транспортеры, шнековые агрегаты и множество других систем, где управляющее воздействие оказывается за счет асинхронного двигателя, можно автоматизировать с помощью линейки преобразователей EMD-MINI.
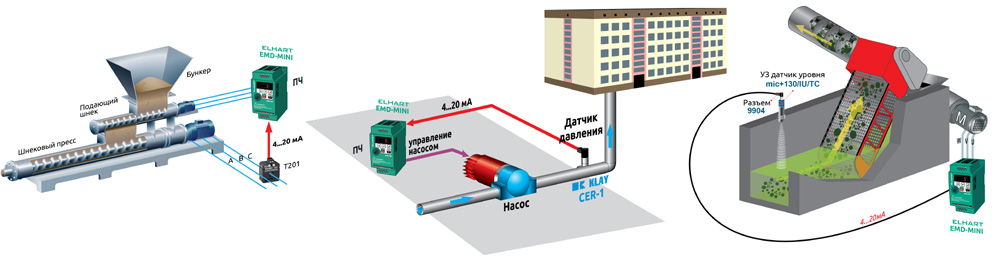 Рисунок 15 — Применение преобразователей частоты EMD-MINI
Рисунок 15 — Применение преобразователей частоты EMD-MINI
Инженер ООО «КИП-Сервис»
Терёшин А.Д.
Список использованной литературы:
- Насосы и насосные станции: Карелин В.Я., Минаев А.В., Учебник для вузов. — 3-е изд., переработанное. -М.: ООО «ИД БАСТЕТ», 2010г. – 448с.
- Насосная азбука: Wilo, 2006г. – 60с.
- СП 31.13330.2012. Свод правил. Водоснабжение. Наружные сети и сооружения. Актуализированная редакция СНиП 2.04.02-84. С изменением № 1.
- Преобразователь частоты EMD-MINI: Руководство по эксплуатации, 2018г. – 128стр.
- Рабочий проект КС-0518-01-АВК: Бурнос А.В., ООО «КИП-Сервис», 2018г. – 6стр.
Источник